股骨干骨折复位机器人主从控制系统的设计
史刚1,2,朱世磊2,张自启1,李钊1,刘淼1,祁富贵1,王鹏飞1,殷悦1,李雪阳1,焦腾1
1.第四军医大学 军事生物医学工程学系,陕西 西安 710032;2.解放军第五医院 医学工程科,宁夏 银川 750004
[摘 要]目的研究设计复位力量大、操作精度高、数字化主从控制的股骨干骨折复位机器人,降低医务人员手术强度和辐射风险、提高复位精度和稳定性。方法分析骨折治疗的方法及流程,设计骨折复位机器人的工作流程,以嵌入式微控制器LPC1788为核心,选用微控制器的串行通信引脚接收复位指令,分析处理完成后通过微控制器的PWM引脚输出控制信号,信号经差分变换后传输给从机械臂的伺服驱动系统,精确控制操作杆执行复位指令,引入反馈监测和童锁功能,增强了系统可靠性。结果在软硬件联合调试过程中,控制系统在正常操作和模拟各种异常或错误操作的情况下,全程无任何错误输出。结论股骨干骨折复位机器人的主从控制系统运行安全稳定,能有效滤除各种错误,输出准确、操作性强,具有重要的临床意义。
[关键词]骨折复位;主从控制;医用机器人;医学数字化;股骨干骨折复位机器人
引言
股骨干骨折是临床上骨科常见骨折之一,据文献报道,在所有的股骨骨折中股骨干骨折占比达36.27%[1]。股骨是人体最长的骨骼,承担着下肢最主要的负重,股骨干骨折恢复不良极易引起患者长期功能障碍甚至是残疾[2]。股骨干骨折的治疗一般分为骨折复位和固定两步,其中复位的准确与否直接影响股骨干骨折的治疗效果。传统的骨折复位治疗是由医生徒手或借助手动牵引装置牵引骨折远端,使之与骨折近端发生相对分离,然后在透视结果的指导下调整骨折远端姿态进行对位对线复位。一方面,医生在复位过程中对骨折远端的偏移量和旋转角度无法进行量化控制,只能手动调整,费时费力,复位精度低,稳定性差,复位状态维持困难。有文献统计显示,采用闭合复位加髓内钉固定手术治疗的病例中在图像的冠状面和矢状面上发生对位不良的情况约占2%~18%[3],发生超过10°的旋转,畸形的发生率更是高达40%[4];另一方面,术中需多次进行透视[5],医生受辐射的时间普遍在158~316 s[6],有很高的健康风险,对于长期接触放射线的创伤科医生来说已经形成了一种心理障碍[7]。
本研究着眼临床需求,结合手术机器人操作精确、灵活稳定、抗辐射、可实现微创化、数字化和智能化等优势[8],充分发挥生物医学工程专业特长,与西京医院创伤骨科合作,研究设计出一款六自由度、复位力量大、操作精度高、抗辐射、数字化的股骨干骨折复位机器人。旨在降低医务人员手术强度和辐射风险、提高复位精度和稳定性,为股骨干骨折治疗提供精确、稳定、微创、低辐射的数字化治疗方式。
1 股骨干骨折复位机器人总体设计
本研究设计的股骨干骨折复位机器人工作流程为:首先由手术人员将患者的骨折近端和远端通过刚性的外架与复位机器人的左右从机械臂建立刚性连接固定,此时,左右从机械臂会稳定的保持骨折远端和近端的相对位置;然后,手术人员控制C型臂进行透视,并通过上位机查看分析透视所得图像,了解骨折两端的相对位置关系后,操作左右两个主操作手柄带动从机械臂进行快速粗略复位动作,粗略复位结束后再次进行透视,根据透析结果进一步通过上位机发送控制指令完成精确复位。与此同时,极限位置检测反馈模块在整个过程中实时检测机械臂的运行状态,当机械臂移动到极限位置时,核心控制芯片会立刻屏蔽相关的指令,并通过RS-232串口将此状态发送给上位机,上位机显示出对应的警告信息,避免给患者和设备造成额外损伤。在整个操作过程中,当主操作手柄无有效指令输出时,从机械臂会稳定地保持在上一条有效指令执行结束的状态,避免了复位关系的丢失,可节约手术时间,减少透视次数。
主操作手柄控制从机械臂的具体过程为:手柄指令通过RS422串行通信接口传输给嵌入式微控制器,微控制器处理指令后将设置好的脉宽调制(PWM)信号和方向信号分别通过PWM模块和IO模块输出,为了提高信号的抗干扰能力和可靠性,核心控制芯片发出的信号经由差分放大芯片转化为差分信号后长距离传输给从机械臂的伺服驱动系统,实现主操作手柄对从机械臂的主从式精确控制。
本研究所设计的股骨干骨折复位机器人整体框图,见图1,图中虚线框内所包含的部分为股骨干骨折复位机械人的主从控制系统。本文将从控制电路设计、控制程序设计和软硬件联调3个方面重点介绍主从控制系统的设计和实验工作。
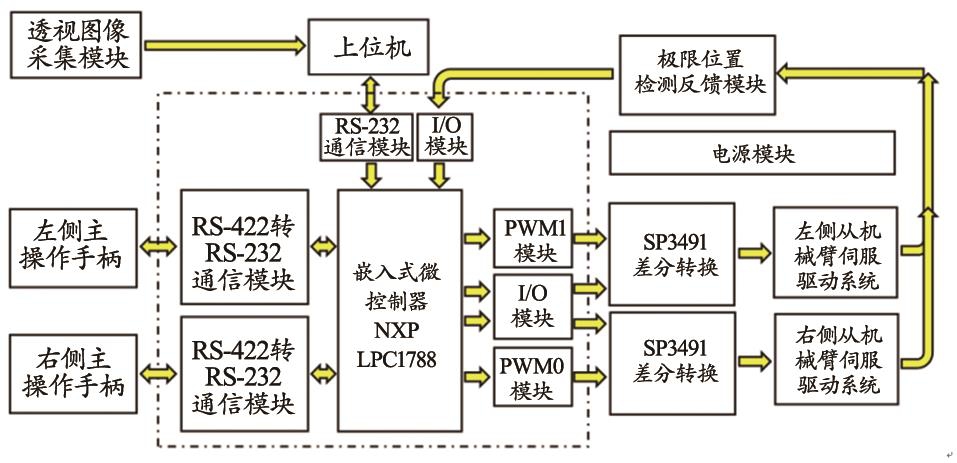
图1 股骨干骨折复位机器人整体框图
2 控制电路设计
控制电路是主从控制系统的载体,电路的抗干扰能力、稳定性直接影响控制系统的运行状态,是整个控制系统的核心。
电路设计平台:主从控制系统的电路原理图设计选用Altium Designer开发软件,该软件把原理图设计、电路仿真、PCB绘制编辑、拓扑逻辑自动布线、信号完整性分析和设计输出等技术完美地融合,操作方便,易于上手。
电源设置:由于主操作手柄需要9 V供电,故主从控制系统选用9 V直流输入,一路直接给两个主操作手柄供电,另一路经SPX1117进行电压转换,输出5 V和3.3 V两个电平用于电路中核心控制芯片和其他模块的电源供应。
核心器件选择:本控制系统电路以嵌入式器件NXP系列的LPC1788微控制器为核心,它是基于ARM Cortex-M3的微控制器,用于处理要求高集成度和低功耗的嵌入式应用。外设组件拥有512 kB的Flash存储器、96 kB的数据存储器、4个UART、一个8通道12位ADC、4个通用定时器、两个6输出的通用PWM、一个窗口式看门狗定时器等诸多资源,适用于医疗系统的应用场合。
主从控制系统的电路连接示意图,见图2。选用该芯片的P0_0、P0_1、P0_2、P0_3、P2_8、P2_9这6个引脚对应的UART0/2/3三个串行通信口分别与上位机、左、右主操作手柄进行通信。选用PWM0和PWM1两组通用脉宽调制输出端口和P0_24-P0_31这8个IO引脚分别输出8路PWM控制信号和8路方向信号,经差分转换后传输给伺服驱动系统,实现对复位杆的精确控制。选用P0_8-P0_23这16个IO引脚控制8路伺服系统运动方向指示灯,用于指示伺服电机的转动方向。选用P1_16-P1_31这16个IO引脚实时监测极限位置光耦电平状态。其中串口0经SPX3232进行电平转换后通过RS-232接口与上位机通信,主要完成机械臂状态信息的反馈和精确控制指令接收功能。串口2和串口3经SP3491进行电平转换后通过RS-422接口分别与左、右主操作手柄连接,接收手柄发出的特定格式的数据帧指令。此外通过引脚P5_1和P5_2控制左右两个主操作手柄指令的输入使能状态。
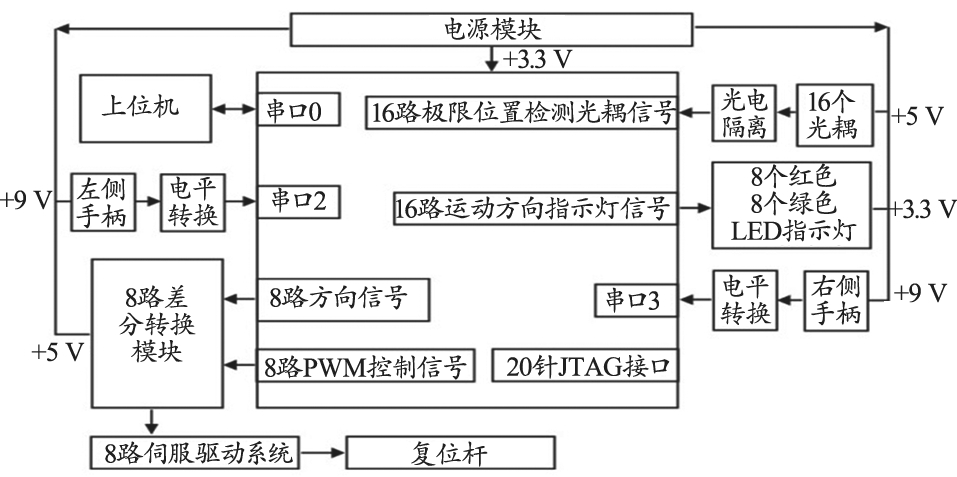
图2 控制电路连接示意图
3 控制程序设计
控制程序是主从控制系统的灵魂,科学合理地设计控制程序,能保证系统稳定性、提高系统运行效率、降低系统功耗。下面主要介绍手柄数据帧接收程序、指令解析程序、脉宽调制输出程序的功能和设计流程。
3.1 手柄数据帧接收程序
此程序主要功能是对手柄发来的指令数据进行接收和筛选。在接收数据之前必须了解操作手柄的预设置和输出指令的编码规则。本设计中使用的GBC-109型双轴霍尔控制手柄的设置及指令编码规则如下:
手柄上电后每间隔10 ms将手柄的状态信息写入长度为6个字节的数据帧内,并通过RS-422串行口发出,通信波特率为9600 bps,传输协议约定为起始位1位,数据位8位,停止位1位,无奇偶校验。6个字节的数据帧格式约定为前两个字节为帧头,最后一个字节为校验位,中间三个字节分别是按键开关状态字、X轴和Y轴的位置状态字。其中按键开关状态字是1字节无符号整数,表示手柄开关状态的具体内容,编码规则为当某个或几个按钮被按下时,该按钮对应字节中的位会被置1,具体详见表1。X轴位置状态字是1字节无符号整数,表示手柄在左右方向的偏移位置,偏向最左侧时为0,居中(自动复位)位置时为128,偏向最右侧时为255,用十六进制数表示为0X00~0X80~0XFF。Y轴位置状态字也是1字节无符号整数,表示手柄在上下方向的偏移位置,编码格式与X轴相同。
表1 按键开关状态字具体内容定义

程序初始化过程中完成对接收串口的波特率和数据位格式的设置,串口准备就绪后启动串口收发功能,当串口接收到数据后首先存放在16个字节的串口接收缓冲器中,当缓冲器溢出或者接收超时时,触发串口接收中断。此时在中断响应程序中单个字节地读取并处理,串口接收缓冲器是一个先进先出队列(First Input First Output,FIFO),每次读取的字节为当前状态最早接收的字节,这样保证了发收循序的一致性。由于数据在传输过程中受各种因素影响可能发生错误,为了筛选丢弃错误的数据,接收程序在读取到符合数据帧格式的6字节的数据后,首选进行校验验证。如果校验正确,则将按键开关状态字、X和Y轴位置状态字存入预先定义的数组,传给指令解析程序做进一步处理。如果校验结果错误则舍弃该帧数据,清空数组,重新读取一帧数据进行校验。具体流程,见图3。
3.2 指令解析程序
此程序主要功能是对通过筛选的指令进行解析、控制IO引脚输出方向信号、并设置相关的标志参数供脉宽调制程序调用。
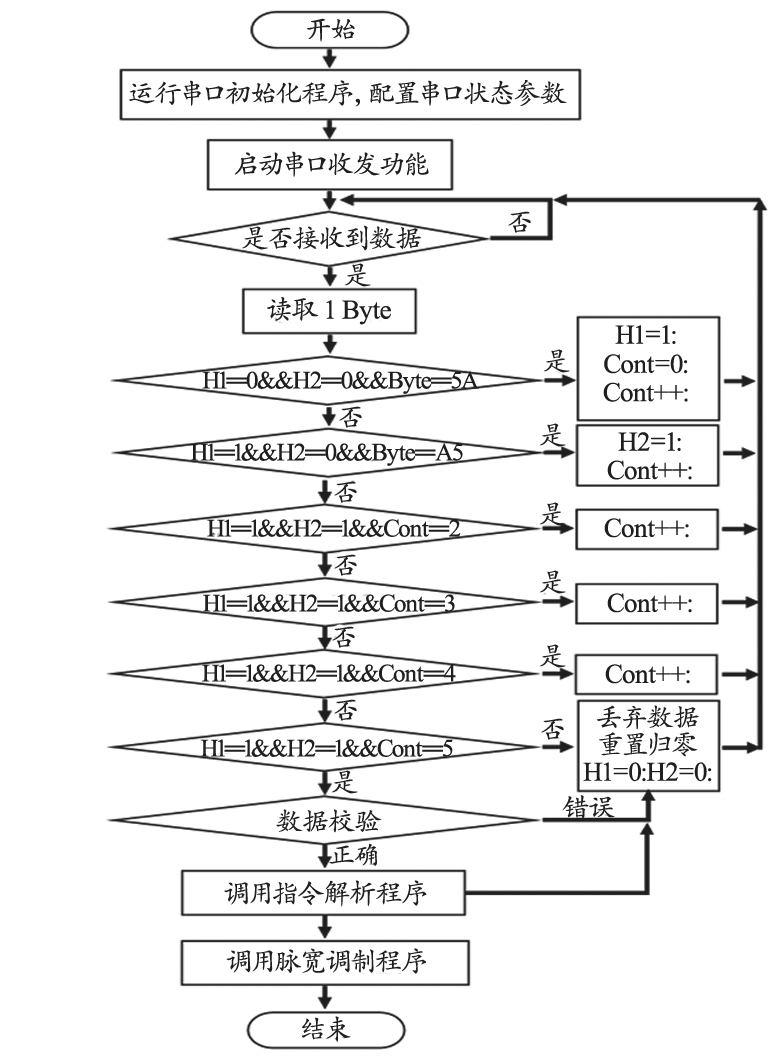
图3 手柄指令接收程序流程图
由于手柄是第三方生产的通用产品,所以在指令解析前需要明确手柄各种操作对应的临床控制意义,清晰全面的约定是指令解析的重要依据。本设计根据临床上复位步骤及动作特点,对指令的意义做出如下约定:首先建立参考坐标系,见图4a~b。

图4 复位机器人左右机械臂的参考坐标系和主操作手柄
本设计中复位机器人的左臂只设置了Y轴和Z轴,可控制末端操作杆分别沿Y、Z轴前进或者后退,右臂设置了X、Y、Z三个轴,可控制末端操作杆分别沿三个轴前进后退或着正反向旋转。其中旋转的正反方向定义参考右手螺旋法则,即用右手握住旋转的中心轴,大拇指指向该轴的正方向,其余四指自然弯曲,此时其余四指所指方向为正方向。由于右臂运动控制比左臂复杂,此处以右臂为主进行介绍,左臂参考右臂即可。考虑到双轴手柄在偏移过程中很难控制仅左右偏移或仅上下偏移,为了保证指令的准确性,只定义手柄左右偏移有效,忽略其上下偏移。右侧操作手柄的S1、S2、S3三个按钮分别对应X、Y、Z三个轴,当其中某个按钮被单独按下时,该按钮对应的轴被选中,此时手柄左右偏移即可控制右臂的操作杆在该轴方向上前进或后退;当S5被按下,同时S1、S2、S3三个按钮中某个按钮被按下,此时手柄左右偏移即可控制右臂的操作杆围绕选中的轴进行正向或反向的旋转。此外,从安全操作的角度出发,为了有效识别手术人员误碰操作手柄等情况,约定在手术人员在操作前和操作结束后同时按下S4和S5按键,第一次按键为屏蔽手柄输入,第二次按键为解除屏蔽。具体控制关系,见表2。左臂控制对应参考右臂控制关系中状态2和状态3即可。
表2 按键组合与手柄控制对应表
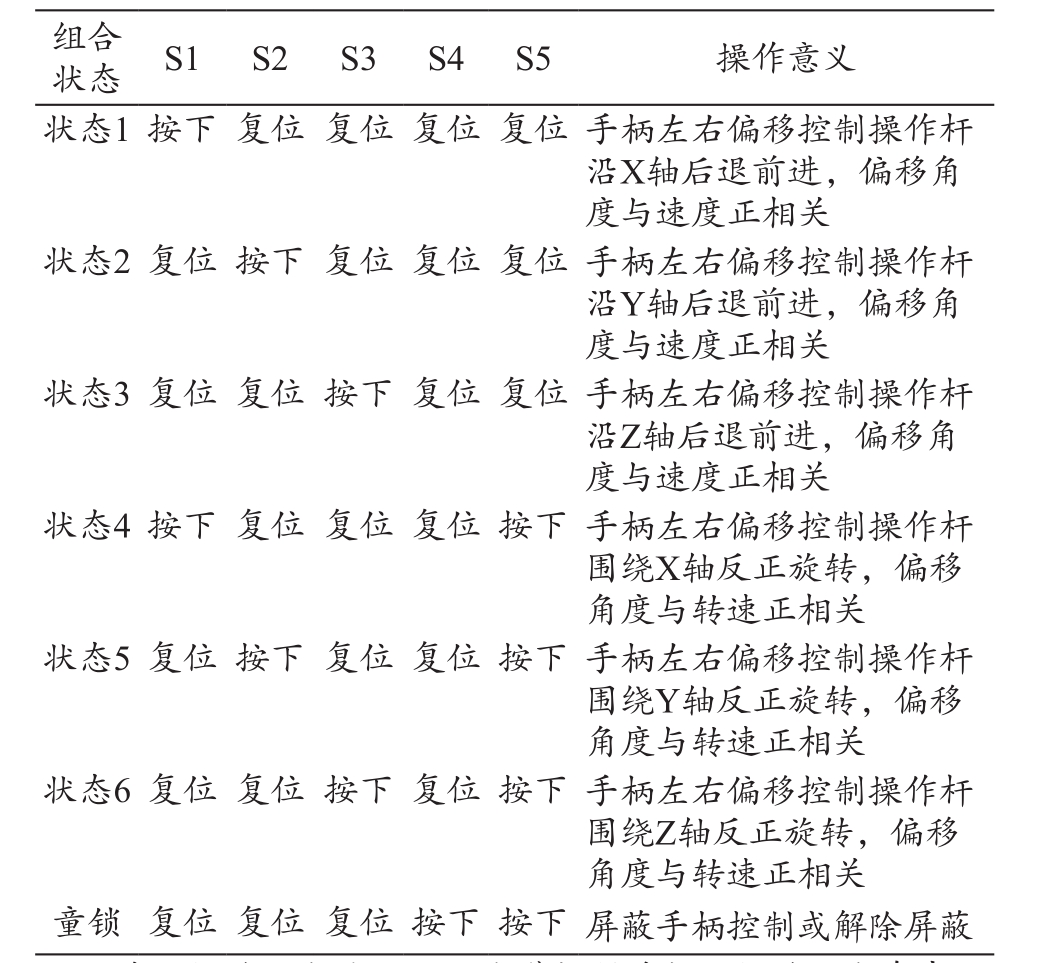
注:其他按键组合均无效,左臂控制手柄的按键组合参考状态2和状态3。
当有通过筛选的指令数据传入时,解析程序根据约定的规则解析指令数据,首先判断按键状态字是否为零,是零或者按键状态字无效则直接结束程序,如按键状态字为0X18,即S4、S5同时被按下时,则查询手柄屏蔽状态,如已屏蔽则解除屏蔽标志,如未屏蔽则设置屏蔽标志。只有当按键状态字有效且屏蔽标志未设置时才进入按键状态分类,根据不同的按键设置不同的输出通道。其次,判断手柄左右偏移位置状态字,根据手柄左右偏移情况设置方向标志位,根据手柄左右偏移角度大小设置输出脉冲波形的频率,设置完成后调用PWM程序控制相关引脚输出符合指令的电平或者脉冲。如果手柄没有偏移,则关闭PWM输出,具体流程图,见图5。
3.3 脉宽调制输出程序
此程序主要功能是根据解析程序传入的通道、速度参数,在相应引脚输出频率受控的PWM脉冲。脉冲信号传输给机械臂伺服驱动系统,最终表现为复位机械手臂的操作杆做出不同的复位动作。
在脉宽调制输出程序中对输出条件应严加判断,必须避免错误的信号输出,在程序设计中设置多个状态标识位,其中一位表示当前按键状态字是否有效,第二位表示当前手柄是否发生左右偏移,第三位表示当前各极限位置监测引脚是否有高电平输入,当且仅当三个状态标识位都为允许输出状态时方可打开PWM输出功能。

图5 指令解析程序流程图
4 实验结果及分析
硬件平台搭建准备完成后,使用Keil-μVision 4软件进行控制程序编写和调试,运行无误后,用J-LINK仿真器通过20针JTAG(Joint Test Action Group)接口写入LPC1788控制芯片,进行仿真。控制程序仿真运行无误后,连接操作手柄和串行接收口进行软硬件联调。同时用泰克科技公司生产的TPS2024型隔离通道数字存储示波器监测在控制手柄不同输入状态时PWM对应的输出波形。
实验过程中首先测试正常输入状态下,输入输出关系,当手柄上S1按下且分别向左右偏移时,通过串口接收到解析程序的反馈,同时通过数组示波器监测输出的PWM波形。实验结果,见图6~7。
在正常指令解析处理测试完成正后,模仿手术过程中各种错误操作方法观察控制信号的输出,验证控制系统的识别错误能力和稳定性。首先模拟操作人员在手柄未屏蔽状态下不小心碰触手柄,分为只有左右偏移无按键、有按键按下无左右偏移两种输出,控制程序准确识别错误输入,输出信号无变化。其次模拟操作人员在屏蔽状态下操作手柄,输出结果表明,在屏蔽状态下手柄的任何有效无效输入均不会产生输出。最后,操作人员通过按下S4、S5解除屏蔽后,输入操作指令,输出结果与预期完全一致。
实验结果表明:该控制系统中各模块运行稳定,控制手柄指令接收程序能准确检测接收数据的正确性,丢弃错误数据,避免由于传输误码导致的错误动作,指令解析程序能准确解析指令的意义,通过串行口输出给上位机,同时将需要的参数传给脉宽调制输出程序,脉宽调制输出程序可以根据传入的参数,结合极限位置电平状态,准确地控制PWM输出的频率和时机。

图6 指令解析程序结果输出
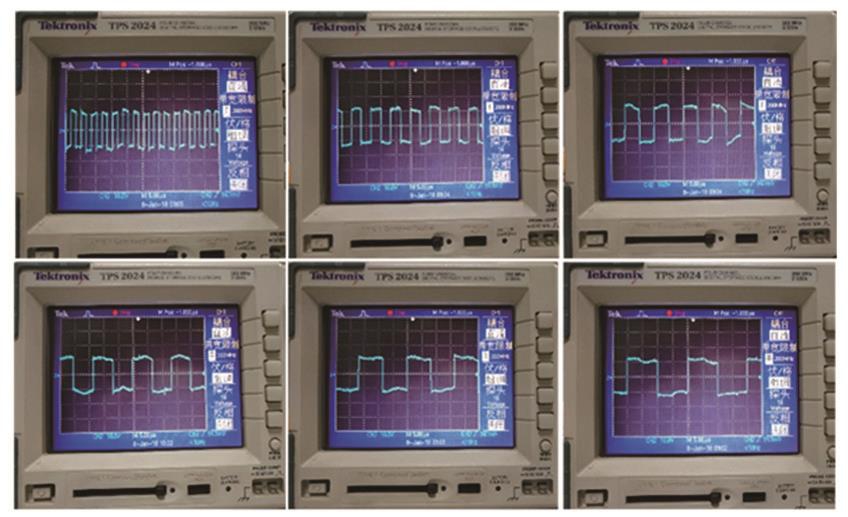
图7 手柄不同偏转角度的PWM输出
5 结语
骨科手术机器人是推动精准、微创骨科手术发展的核心智能化装备,是骨科手术发展的趋势,已成为国际研究热点[9],美国[10]、韩国[11]、加拿大[12]等国家的研究机构都在开展此方面研究,哈尔滨工业大学[13]、北京航空航天大学[14]、东南大学[2]、北京积水潭医院[15-16]等机构也在不断进行研究探索。目前骨科机器人仍有很大的发展空间[17],本文设计的股骨干骨折复位机器人控制系统可以根据复位手术的不同需要,提供快速定量粗略复位、精准平稳的精确复位、持久稳定的复位保持和避免误操作的类童锁功能,可以准确、安全、可靠的实现主操作手柄对从机械臂的主从控制,借助机械臂的操作可有效减轻手术人员的手术强度,通过数字化指令控制,可实现复位动作的量化,提高复位精确度。此外,通过将控制台与机械臂分离,可实现操作人员在屏蔽手术室外控制机械臂进行复位,降低手术人员的健康风险。在已经开展的离体牛股骨干骨折复位实验中,该系统运行平稳,验证了此系统的可行性,有望为临床骨科股骨干骨折治疗提供新的方法,具有重要的临床意义。
[参考文献]
[1] 唐佩福,王岩.骨折手术学[M].北京:人民军医出版社,2013:849.
[2] 孙小刚.股骨干骨折复位辅助机器人系统研制[D].南京:东南大学,2016.
[3] Wolinsky PR,Mccarty E,Shyr Y,et al.Reamed intramedullary nailing of the femur: 551 cases[J].J Trau,1999,46(3):392-399.
[4] Westphal R,Winkelbach S,Gösling T,et al.A surgical telemanipulator for femur shaft fracture reduction[J].Inter J Med Robot,2006,2(3):238.
[5] 赵燕鹏.长骨骨折精准手术机器人系统研究[D].北京:中国人民解放军医学院,2016.
[6] 韩巍,刘文勇,林鸿,等.机器人辅助股骨干骨折复位的性能评价[J].中国实验诊断学,2012,(6):951-954.
[7] 张志桐,申素芳,胡长青,等.超声监测下长骨骨折复位髓内针固定术的可行性初探[J].中国医疗设备,2014,(3):161-163.
[8] 王成勇,谢国能,赵丹娜,等.医疗手术机器人发展概况[J].工具技术,2016,(7):3-12.
[9] 韩晓光,刘亚军,范明星,等.骨科手术机器人技术发展及临床应用[J].科技导报,2017,(10):19-25.
[10] Abedinnasab MH,Farahmand F,Gallardoalvarado J.The wide-open three-legged parallel robot for long-bone fracture reduction[J].J Mech Robot,2017,(1):15001.
[11] Kim WY,Ko SY,Park JO,et al.6-DOF force feedback control of robot-assisted bone fracture reduction system using double F/T sensors and adjustable admittances to protect bones against damage[J].Mechatronics,2016,35:136-147.
[12] Majidifakhr K,Kazemirad S,Farahmand F.Robotic assisted reduction of femoral shaft fractures using Stewart platform[J].Stud Health Technol Inform,2009,142:177-179.
[13] 于凌涛.6-PTRT型并联机器人关键技术及其在正骨手术中的应用[D].哈尔滨:哈尔滨工业大学,2007.
[14] Wang T,Li C,Hu L,et al.A removable hybrid robot system for long bone fracture reduction[J].Biomed Mater Eng,2014,24(1):501-509.
[15] 苏永刚,孙志彬,朱罡,等.基于体感交互的骨折复位机器人控制方法实验研究[J].中国生物医学工程学报,2016,(3):380-384.
[16] 韩巍,王军强,林鸿,等.主从式长骨骨折复位机器人的实验研究[J].北京生物医学工程,2015,(1):12-17.
[17] 邵泽宇,徐文峰,廖晓玲,等.骨科机器人的发展应用及前景[J].军事医学,2016,(12):1003-1008.
Design of Master-Slave Control System for Femoral Shaft Fracture Reduction Robot
SHI Gang1,2, ZHU Shilei2, ZHANG Ziqi1, LI Zhao1, LIU Miao1, QI Fugui1, WANG Pengfei1, YIN Yue1, LI Xueyang1, JIAO Teng1
1.College of Military Biomedical Engineering, The Fourth Military Medical University, Xi’an Shaanxi 710032, China;2.Department of Medical Engineering, The 5thHospital of PLA, Yinchuan Ningxia 750004, China
Abstract:ObjectiveIn order to reduce the medical personnel operation intensity and radiation risk, improve the accuracy and stability of reduction, this article designed a master-slave control robot which was more powerful, high precision and working in digital pattern.MethodsFirst of all, the methods and procedures of fracture treatment were analyzed and the working process of fracture reduction robot was designed. The control signal was output through the PWM pins of the microcontroller after the analysis was completed. Then, the signal was transmitted by differential transformation to the servo drive system from the manipulator.Finally, the reset instruction was executed by the accurate control of the operating rod, and feedback monitoring and lock function were introduced, which enhanced the system reliability.ResultsThere was no wrong operation under the condition of the control system operating normally and simulating various abnormal or wrong operations during the software hardware joint debugging process.ConclusionThe master slave control system of femoral shaft fracture reduction robot is safe and stable, and it can effectively filter out all kinds of improper operation, output accurately and operably, which has important clinical significance.
Key words:fracture reduction; master-slave control; medical robots; medical digitization; femoral shaft fracture reduction robot
[中图分类号]R318
[文献标识码]A
doi:10.3969/j.issn.1674-1633.2018.07.004
[文章编号]1674-1633(2018)07-0017-05
收稿日期:2018-01-06
修回日期:2018-01-22
基金项目:国家自然科学基金青年项目(31600796);后勤科研重点项目(BWS14044)。
通讯作者:焦腾,副教授,主要研究方向为嵌入式系统开发及应用。
通讯作者邮箱:jiaoteng@fmmu.edu.cn
本文编辑 袁隽玲