基于永磁定位技术的三维腿部运动检测系统设计
张可,汤福南,李修寒,吴小玲
南京医科大学 生物医学工程系,江苏 南京 210029
[摘 要]目的设计一种基于永磁定位技术的三维腿部运动检测系统,实现对腿部运动的实时显示。方法首先,在腿部关节点佩戴3轴磁传感器,小磁体佩戴在与其连杆的肢体上,两者距离约6 cm。磁传感器检测该小磁体的磁感应强度,并对采集到的信息进行多级放大、滤波处理,通过串口发送至上位机。其次,编写上位机程序。利用Labview软件处理接收到的电压信号,还原为磁感应强度信号,并通过PSO与LM算法结合进行磁源定位。最后,加载三维腿部骨骼模型,实现直观的三维实时显示。结果磁传感器检测范围实验显示,小磁体与磁传感器之间距离设置为6 cm时,既可满足磁偶极子模型,又对临近组传感器无影响。小磁体3轴定位平均误差在1 cm之内,整个系统完成一次完整的数据采集约耗时17.5 ms,基本满足实时性的要求。三维腿部运动检测实验显示,实验结果与被测者腿部姿态基本一致。结论基于永磁定位技术的三维腿部运动检测系统能够实现三维腿部运动检测功能,为步态检测及腿部康复训练提供了一种新方法。
[关键词]运动检测;永磁定位;三轴磁传感器;定位算法
引言
行走是中枢神经系统的终极目标,步态是其在生物力学水平上的体现。正常步态需要中枢神经系统、周围神经系统及骨骼肌肉系统协调工作[1]。肢体残疾、关节疾病和小儿脑瘫等都会导致行走障碍和步态异常[2]。作为生物力学的一个特殊分支,步态分析用于对中枢神经系统、周围神经系统损伤以及骨关节病损的患者进行障碍诊断和程度评定、制定康复治疗方案以及用于评定术后疗效[3-4],也常被用于运动员训练、以及确认伤员是姿态相关还是动作相关的相关医学问题等[5]。
步态运动学分析的关键技术在于高精度的三维人体运动检测。该技术现阶段主要分为4类:声学式、光学式、机械式、电磁式[6-7]。声学式运用超声传感技术接收人体佩戴的超声波发生器发出的超声波,确定发送器的方向和位置。该方法优点是成本较低,缺点是检测延时较大,还要求无遮挡、无噪声的环境。光学式检测技术将一些特制的标志或发光点贴在身体的关节、肘部、腕部等关键部位,运用多台高速摄像机同时拍摄,通过图像处理获取人体运动[8]。该方法是目前三维人体运动检测系统的主流方法,其优点是检测精度高、速率高,检测过程中没有机械装置限制,被测者的活动范围,可以满足多数体育运动测量的需要。缺点是系统价格较贵,对于场地的光照要求高,且需要人工干预后处理过程。机械式运动检测技术由刚性连杆和关节组成。人体运动引起机械关节的转动,关节中的角度传感器测得转动角度的变化,通过刚性连杆坐标变换得出运动轨迹。机械式运动检测技术的优点是成本低、装置定标简单、精度高。缺点是刚性连杆束缚被测者的运动,对动作的限制大,无法完成一些激烈的动作。电磁式运动检测技术由发射源、接收传感器和数据处理单元组成。安置在被测者身体关节位置的接收传感器接收发射源产生的电磁场,处理单元对接收到的信号进行处理,逆向求解出传感器的空间位置和方向[9]。电磁式运动检测技术的优点是得到的检测结果是六维数据,包括位置和方向。检测速度快、实时性好。其缺点是场地附近的金属物品会造成电磁场畸变,系统的检测精度易受检测环境影响。
近年来,各类磁传感器发展迅猛,它具有体积小、分辨率高、灵敏度高、抗干扰能力强,工作频带宽,温度稳定性好等优点。目前磁定位技术在医学、导航系统、磁场测量和定位等方面已有广泛的应用。
磁定位技术主要分为电磁定位技术和永磁定位技术。电磁定位技术一般由磁场发射源、磁场接收、数据处理3部分组成。向三轴线圈通入交流或直流脉冲信号,线圈周围产生的感应磁场作为磁场发射源。磁传感器作为磁场接收装置,然后将采集到的信号进行处理得到六维数据。电磁定位技术的优点是不受视线阻挡。缺点是采用直流或低频电流作为激励,需要控制电路,并有能耗,环境中的铁磁性物质会造成电磁场畸变,从而影响精度[10]。
永磁定位技术采用永磁体作为信号源,其优点是无需供电和控制电路、无需激励电流。现阶段永磁体多采用强磁材料钕铁硼制成,其具有体积小、磁性强的特点,这也使得永磁定位技术的信号源占用空间小,在微型化和功耗要求高的应用中优势明显。
本文研究了一种新型的基于永磁定位技术的三维腿部运动检测系统。采用三轴磁传感器来检测佩戴于人体腿部的永磁体磁感应强度,通过定位算法逆向求解出永磁体的位置和方向,再经几何坐标变换重构出腿部运动姿态。
1 方法
1.1 系统模型建立
人腿由髋关节、膝关节和踝关节连接腿部肌肉和骨头构成。其中髋关节有3个自由度,膝关节有1.5个自由度(膝关节弯曲时可轻微内收、外展),踝关节有3个自由度。根据3个关节的自由度可将人腿简化为图1所示模型。
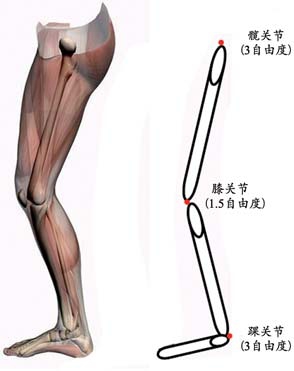
图1 人腿简化模型
本文所设计的三维腿部运动检测系统的模型,见图2。本系统由3组永磁体定位系统组成。每组定位系统皆由两个佩戴于关节处的三轴磁传感器和一个粘贴于与该关节连杆的肢体上的圆柱形小磁体构成。每组定位系统以其中一个磁传感器为坐标原点,可对相应的圆柱形小磁体进行定位,定位结果包括坐标和方向。因小磁体磁场强度随距离呈指数衰减,通过实验选取合适的小磁体和距离,使得每组定位系统的小磁体只影响本系统磁传感器的检测结果,互相之间无影响。因此,只要知道上一级检测系统的小磁体与下一级关节处传感器之间的距离即可通过坐标变换确定腿部的三维空间姿态。
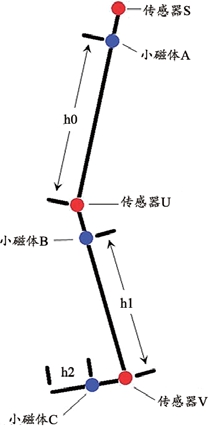
图2 三维腿部运动检测系统模型
1.2 永磁定位模型
永磁定位技术是利用获取的磁场数据逆向求解出磁源位置的过程。本系统中,磁场观测点与永磁体之间的距离大于永磁体尺寸的10倍,因此永磁体可等效为磁偶极子[11]。目前,对磁偶极子的空间磁场分布的研究有两种等效模型:等效磁荷模型和等效电流环模型[12]。等效磁荷模型通常用于研究磁性材料内的磁场分布,系统选用等效电流环模型研究永磁体外部空间磁场分布。微电流环与磁偶极子的空间磁场分布情况基本一致,只在靠近微电流环和磁偶极子的地方两者存在差异。当观测点与永磁体的距离大于10倍的永磁体尺寸时,永磁体的空间磁场分布可等效为微电流环的空间磁场分布。
将一圆形载流回路置于坐标系xoy平面,其圆心与球坐标原点重合,见图3,载流回路半径为a,电流为I,回路面积为πa2。
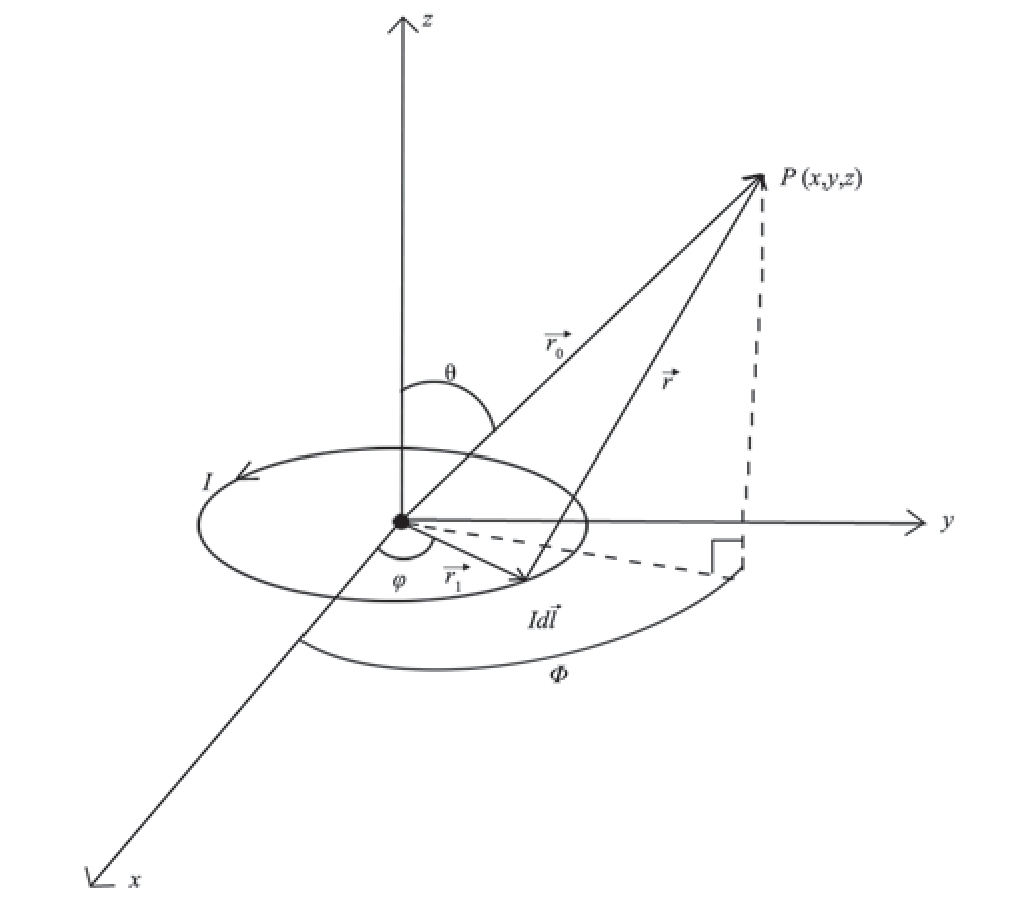
图3 磁偶极子模型
P为空间中相对微电流环很远的一点,P点位置矢量为![]() 载流线圈在
载流线圈在![]() 处的电流元为
处的电流元为![]() 根据文献[13-14]可得电流元
根据文献[13-14]可得电流元![]() 在A点产生的磁感应强度为:
在A点产生的磁感应强度为:
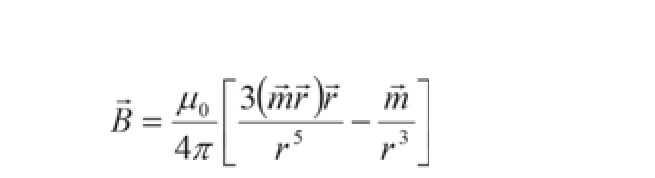
其中,![]() 为载流线圈的磁矩矢量
为载流线圈的磁矩矢量![]() 为载流线圈的面积矢量。
为载流线圈的面积矢量。
将磁传感器放置于A点,检测永磁体在该点产生的磁感应强度,通过定位算法逆向求解出逆向求解出永磁体的空间位置和磁矩矢量,磁场定位模型,见图4。
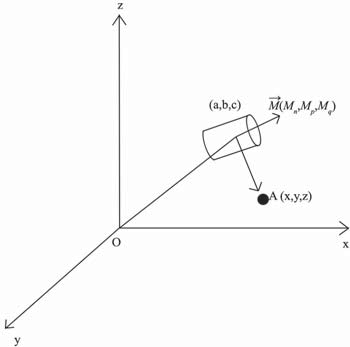
图4 磁场定位模型
1.2 硬件设计
本文所设计的基于永磁定位技术的三维腿部运动检测系统是以各向异性磁阻传感器HMC1043[15]为传感元件,通过检测小磁体的空间磁场强度进行空间定位。本系统硬件电路主要包括以下部分:信号检测电路、模拟信号处理电路、模/数转换电路、MCU控制电路和串口通信电路。系统硬件框图,见图5。
1.2.1 信号检测电路
置位/复位电路。在外磁场的作用下,传感器内部磁畴会变得杂乱无章,导致其检测灵敏度降低。置位脉冲将磁畴统一到与易磁化轴相同的方向,复位脉冲使磁畴统一到与易磁化轴相反的方向。所设计的置位/复位电路用于产生置位/复位脉冲,使传感器磁畴方向统一,恢复传感器灵敏度。

图5 三维腿部运动检测系统硬件框图
1.2.2 信号处理电路
模拟信号处理电路包括模拟开关切换电路、一级放大电路及二级放大滤波电路。模拟开关切换电路将输入的6对共计12路信号选择一对输出,12路信号共用一组模拟信号调理电路,简化系统硬件电路。一级放大电路为可编程仪表放大电路,进行初级信号放大。二级放大滤波电路为固定增益放大电路,对信号进行二级放大以及高频滤波。
1.2.2.1 模拟开关切换电路
定位1个小磁体需要2个传感器,而每个传感器输出3对差分电压信号,因此定位1个小磁体就有6对共12路电压信号。而对整条腿的3个关节进行定位就有36路电压信号。本系统对每一个小磁体定位共用一路模拟信号调理电路,这样整个系统只需3路模拟信号调理电路。
对于每一路模拟信号调理电路而言,有6对共12路电压信号。选用一片模拟开关切换芯片ADG5207将6对差分电压信号逐对输出。
ADG5207是单芯片CMOS模拟多路复用器,在双极性模拟信号应用中,工作电压范围为±9~±22 V,而在单极性模拟信号应用中,电压范围为+9~+40 V。内置8个差分通道,将8路差分输入根据3位二进制地址线A0、A1和A2确定的地址切换至公共差分输出。
1.2.2.2 一级放大电路
一级放大电路选用低漂移、轨到轨数字可编程仪表放大器AD8231。AD8231中集成了运算放大器和可编程仪表放大器,本系统仅选用可编程仪表放大器。通过MCU控制A0、A1、A2和 CS 即可实现增益编程。一级放大增益设置为16。
本系统中AD8231为单电源供电,当差分输入信号为负时,输出为零,信号丢失。将3.0 V 参考电压接至REF引脚,初级放大后输出信号被抬高至3.0 V左右。参考电压由REF2930提供,该芯片是一款低功耗基准电压源,具有精度高、输出电压波动小(±1 mV)、工作温度范围广(-40 ~+125 ℃)、外围电路简单等优点。
1.2.2.3 二级放大滤波电路
由于输入信号较弱,一级放大仅做了信号放大,没有做滤波处理。二级放大滤波电路将滤除输入信号中掺杂的高频干扰,同时对信号进行二级放大。
二级放大选用精密仪表放大器AD8221。其共模抑制比(CMRR)在同类产品中最高。因此,AD8221可以抑制线路谐波和宽带干扰。目前主要应用在精密数据采集、医疗器械和航空航天仪表领域。
AD8221的电压增益调整范围为(1~1000),其增益传递函数为:
只需通过调整电阻RG即可方便的设置增益,调整放大倍数。AD8221的输入端接低通RC网络,以滤除电路中的高频干扰。滤波器输入信号带宽由下式决定:
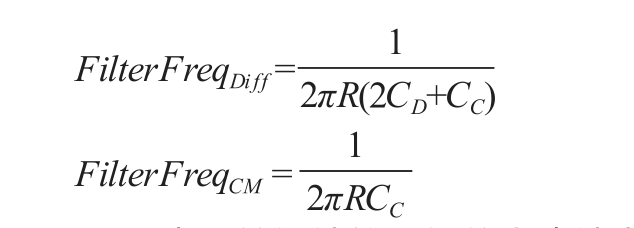
其中CD≥10CC。本系统设计的二级放大滤波电路,见图6。二级放大增益设置为32。

图6 二级放大滤波电路
1.2.3 模数转换电路
经过二级放大滤波,输出信号已经达到采样标准。但本系统采用的主控芯片MSP430F149自身的A/D转换只有12位,而传感器的灵敏度要求A/D转换至少要达到14位,系统需外扩A/D转换器。
本系统选用CMOS结构的逐次比较型A/D转换器ADS8509。该芯片为16位A/D转换器。有3路模拟输入,1路SPI串行输出。数据输出可采用内部参考时钟或外部时钟。单极性+5 V供电,工作温度范围-40~85 ℃,片内自带基准源,有6种可选的电压输入范围:4、5、10、±3.3、±5和±10 V。采样率高达250 kHz,最大非线性误差小于±2 LSB[16]。
本系统所设计A/D转换电路,见图7。电路输入电压范围选择±5 V,采用外部时钟,输出格式为二进制补码,其最高位为符号位,故该电路转换精度为15位。
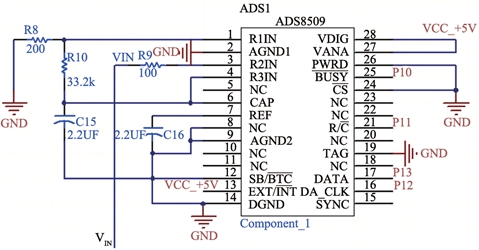
图7 A/D转换电路
1.3 软件设计
本系统中MSP430F149主要负责模拟开关切换电路控制、一级放大增益调节、A/D采样电路控制以及接收A/D采样的数据并发送至上位机。本系统中采用LabVIEW开发上位机程序,程序主要解决以下几个问题:① 编写串口程序采集下位机发送的数据;② 记录下信号调理电路的失调电压,后续采集到的电压值减去此值即可实现软件失调电压补偿;③ 将接收到的电压值转换为磁感应强度值;④调用PSO算法和L-M算法对小磁体进行空间定位;⑤ 编写显示程序,调用三维腿部骨骼模型,实现定位结果的直观显示;⑥ 编写数据存储、回放程序,实现定位结果的储存和回放。
上位机程序界面是系统程序面向用户设计。其主要功能是:串口参数设置、系统功能选择、三维腿部骨骼模型定位显示和各方向运动波形显示。本系统所设计的上位机程序界面,见图8。该界面简洁直观,用户在使用时无需了解具体程序就可进行定位操作。界面左侧为串口设置和功能选择按钮,可选择开始定位、停止定位、保存数据、数据回放和退出程序。右侧为结果显示区域,可通过调用wrl格式的腿部骨骼模型直观显示三维定位结果,也可分别显示各个方向的运动分量曲线,便于计算和分析。
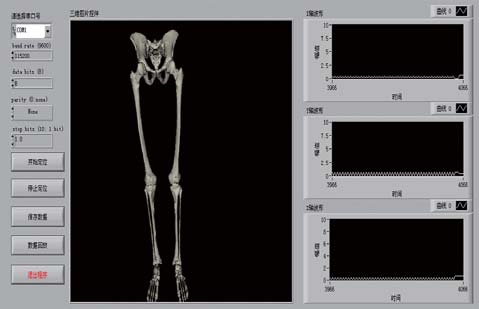
图8 上位机程序界面
2 实验及结果
2.1 小磁体选择实验
本文选用圆柱形小磁体作为被检测目标,小磁体磁性越强,3轴磁传感器的磁感应强度变化范围越大。需要通过实验选择一种磁矩大的小磁体。
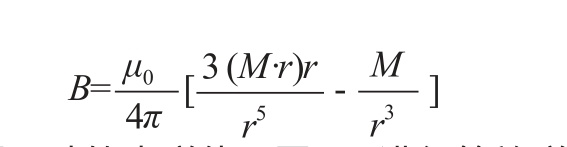
由磁偶极子模型知:磁感应强度B与磁体磁矩M的关系为:
对5种不同尺寸的小磁体(图9)进行等效磁矩测量,磁矩测量实验,见图10。用高斯计探头沿着小磁体Z轴测量,记录不同距离时高斯计示数。
记Z轴正方向的测量值为Bz+,Z轴负方向的测量值为Bz-,ΔBz是环境磁场在Z轴方向的分量。
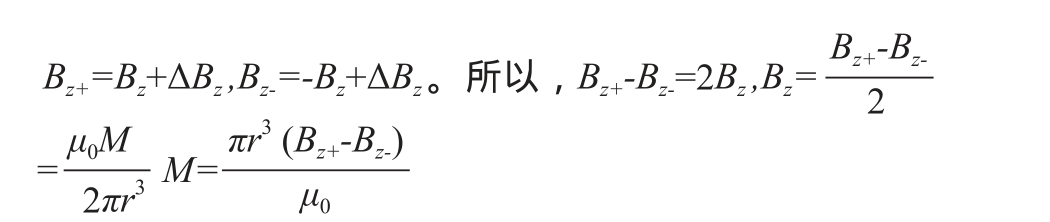

图9 5种不同尺寸小磁体示意图
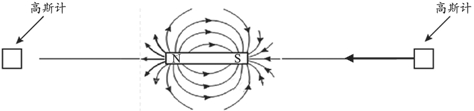
图10 磁矩测量实验
小磁体磁距测量实验结果,见表1。
表1 小磁体磁矩测量实验结果
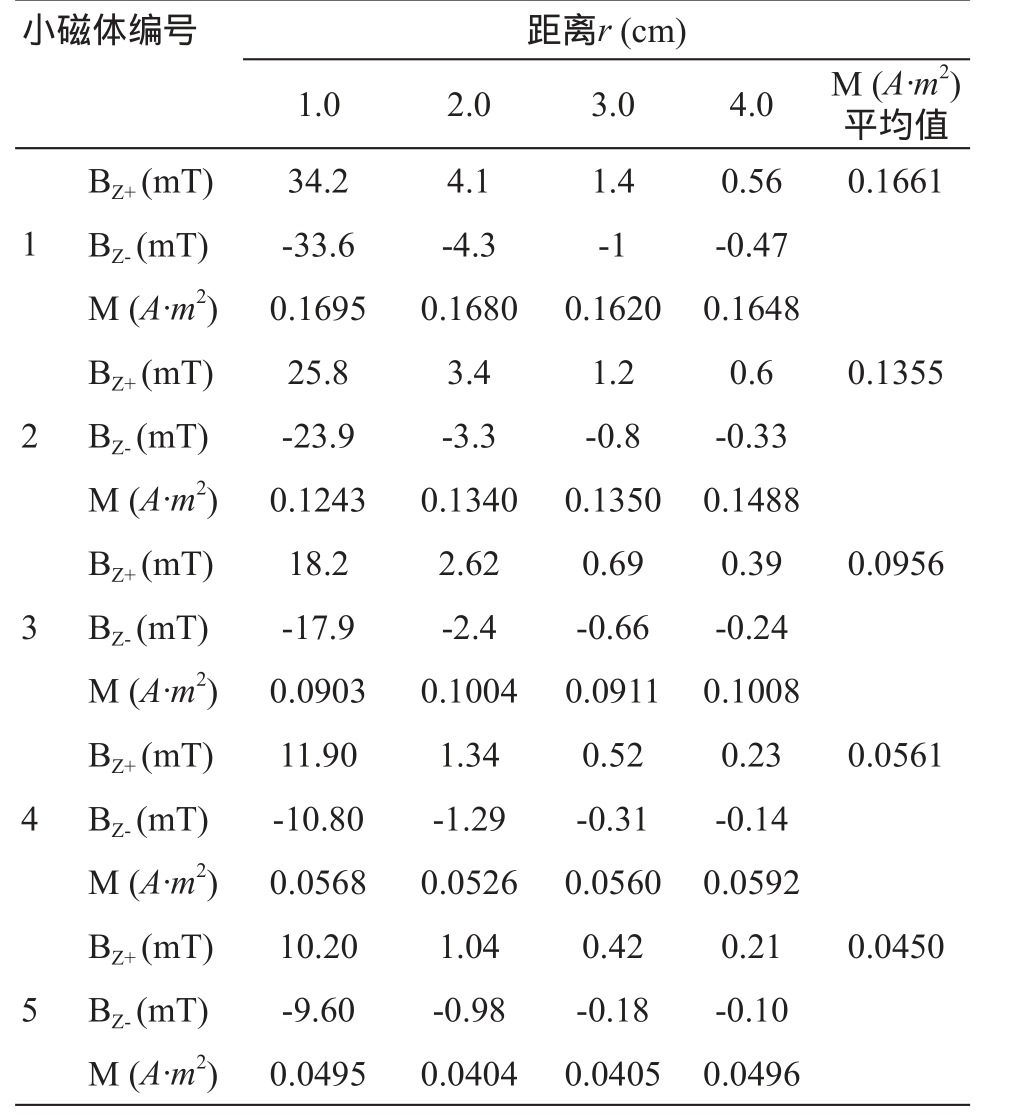
结果显示,1号小磁体的磁矩最大,所以三维腿部运动检测系统选用1号小磁体。
2.2 磁传感器检测范围实验
三维腿部运动检测系统模型采用3个小磁体定位,小磁体分别定位腿部3个关节的坐标,然后经过坐标变换重构出腿部姿态。此过程要求每组3轴磁传感器只受本系统所需定位小磁体的影响,而不受其他系统小磁体的影响。因此需要通过实验确定3轴磁传感器的检测范围。
将小磁体放置于传感器x轴方向上,从距离30 cm逐渐移动至3 cm处再返回,并在20、15、10、8、6和3 cm处稍作停顿,经计算x轴输出的磁感应强度变化结果,见图11。图中横坐标为时间,纵坐标为磁感应强度值(单位为mT)。
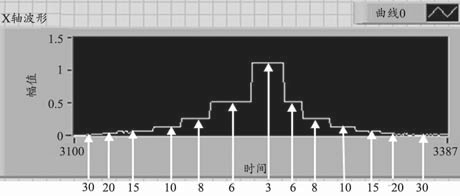
图11 x轴磁感应强度值随距离变化曲线
实验结果显示,当小磁体与传感器距离大于30 cm时,磁传感器检测到的磁感应强度值为0,两者之间距离小于10 cm时,磁感应强度变化最明显。实验测得人体髋关节与膝关节之间距离为42 cm,膝关节与踝关节之间距离为40 cm。本文选用的小磁体直径为0.5 cm,厚度为1 cm。因此,将小磁体与磁传感器之间距离设置为6 cm,既可满足磁偶极子模型,又对临近组传感器无影响。
2.3 三维腿部单个关节运动检测
只对左腿髋关节做三维腿部单个关节运动检测实验。实验中,被测者髋关节做外展踢腿动作,检测结果,见图12。
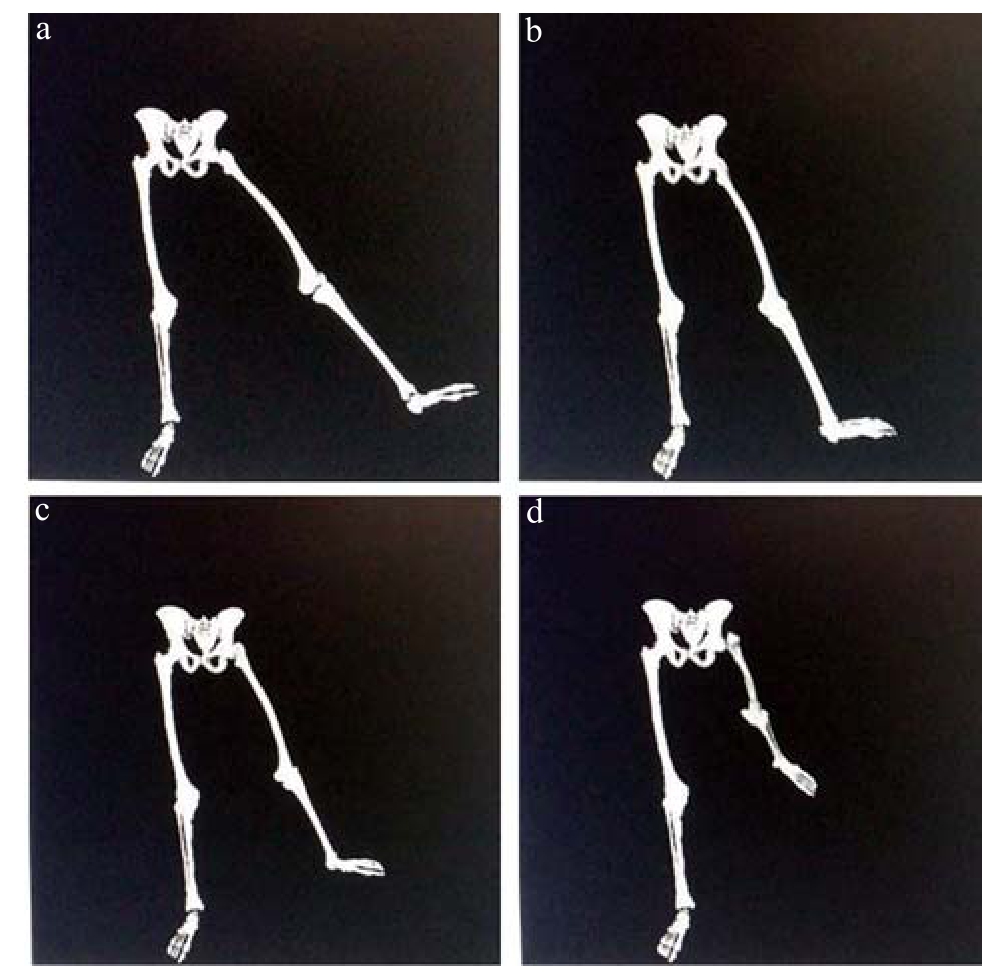
图12 髋关节三维运动检测实验结果
注:a.上踢至最高点;b.收回;c.后踢;d.后踢至最高点。
图12中按顺序a~b~c~d运动,分别为外展上踢至最高点、收回、后踢、后踢至最高点。该过程与被测者实际运动过程一致。踢至最高点的三维模型显示和小磁体坐标三维显示,见图13。
图13中,小磁体的坐标为(0.045, -0.047, 0.013),单位为m。小磁体三维坐标与三维模型显示一致。

图13 后踢至最高点三维显示
2.4 三维腿部运动检测
在被测者左腿髋关节、膝关节和踝关节分别佩戴磁传感器,分别定位对应肢体上小磁体的坐标和方向,按系统模型进行坐标变换重构出三维腿部运动姿态。定位结果,见图14。
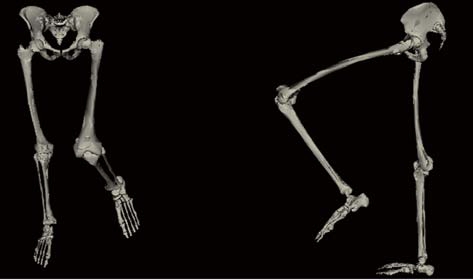
图14 三维腿部运动检测实验结果
图14所示的三维腿部运动检测实验结果与被测者腿部姿态基本一致。但由于单个磁定位系统存在误差,经过几何坐标变换导致大腿、小腿和脚的定位误差逐级增加。
2.5 小磁体定位精确度实验
将直径为0.5 cm,厚度为1.0 cm的圆柱形小磁体分别置于传感器的x、y和z轴上,当检测其中任一轴时,另外两轴坐标设置为0。每个轴上分别检测小磁体放置于4、5、 6和7 cm处的坐标值。每个位置检测100个数据,每个数据间隔1 s。将3个轴检测到的4个位置的数据分别绘制在3张图中,得到检测值波形图,见图15。
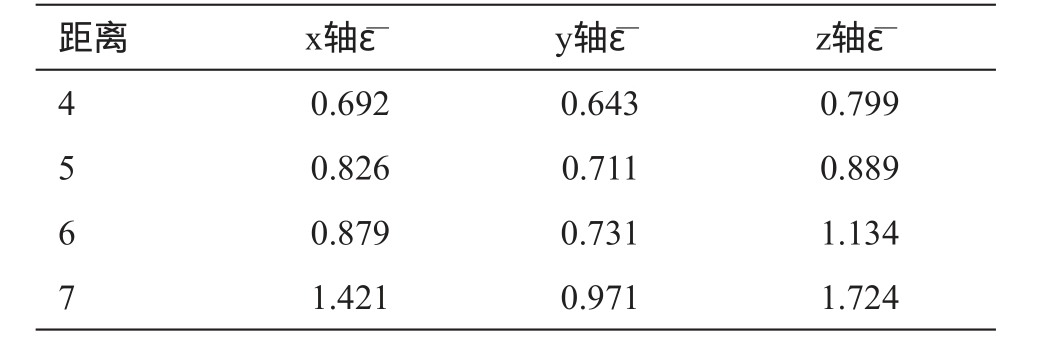
对每组的100个检测数据按 计算平均误差,式中N=100。结果见表2。
计算平均误差,式中N=100。结果见表2。
图13显示,不同距离各轴的检测值分布基本平稳。分析表2,小磁体与传感器之间距离越远定位误差越大。
分析误差产生原因,主要有以下几方面:① 3轴磁传感器使用一段时间后内部磁阻阻值发生变化,使得各轴的惠斯通电桥输出值之间存在差异;② 本实验在正常实验室环境中进行,没有屏蔽装置,检测过程受到环境磁场干扰,数据显示扰动;③ 单个小磁体定位系统硬件电路采用模拟切换开关切换信号进行处理,该过程偶尔会产生数值的跳变,影响采样结果。
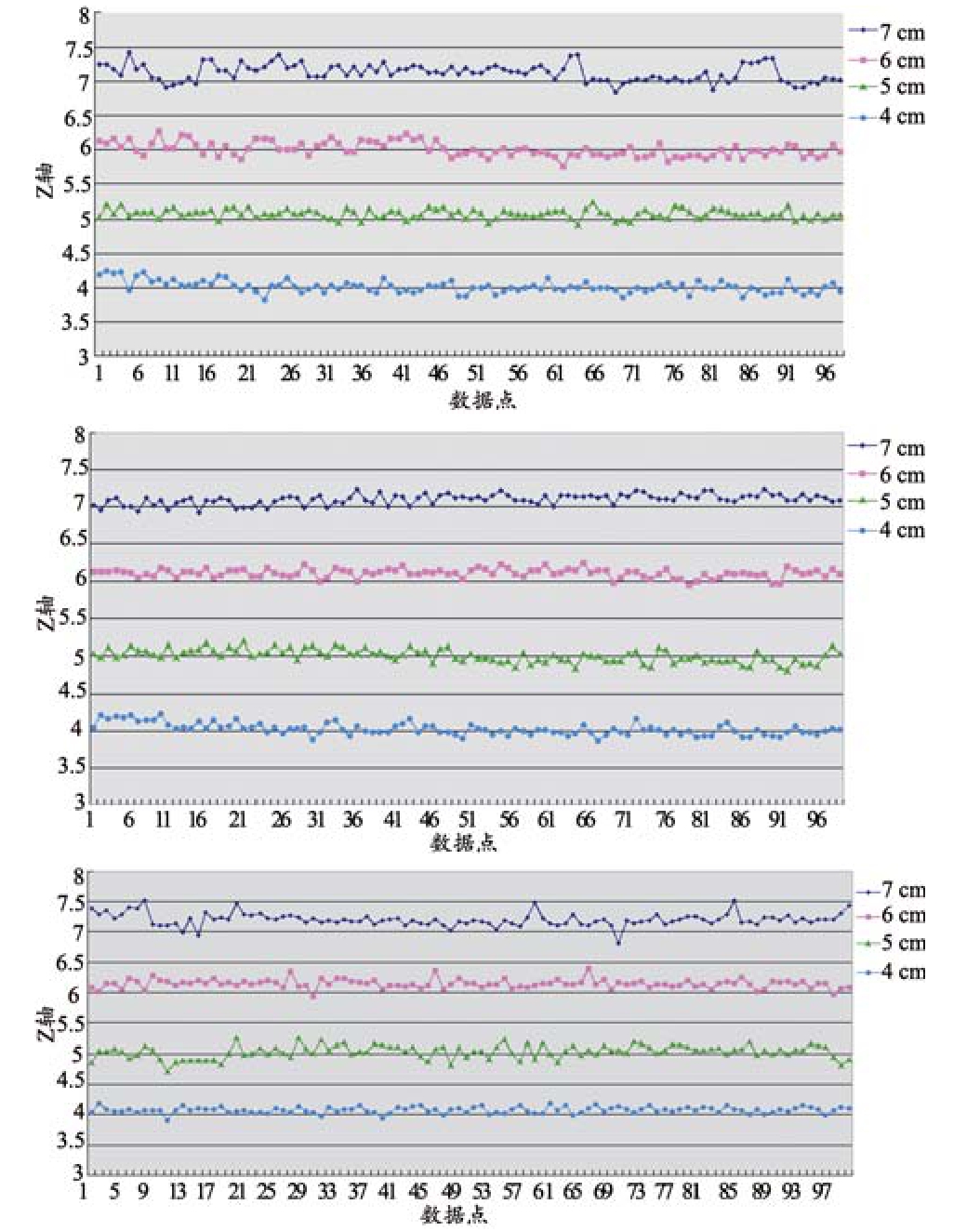
图15 不同距离x、y和z轴检测值
表2 x、y和z轴不同距离的平均误差ε
3 结论
本研究首次将永磁定位技术运用于三维腿部运动检测系统中,采用永磁体作为定位磁源,无需电源激励;采用磁传感器定位磁场,体积小的磁源符合磁偶极子模型,同时充分利用了磁传感器的检测范围;检测系统具有体积小、无创、无视线障碍、对环境磁场要求低等优点。本系统分别对3个小磁体进行定位,只需通过坐标变换即可重构三维腿部姿态。但该系统目前存在定位误差较大的问题,今后可通过增加传感器个数、校准传感器灵敏度、选取磁矩更大体积更小的磁源、优化硬件电路等方法来减小误差。未来,可将采集到的腿部运动参数直接用以控制外骨骼装置,同时采用上位机加载三维腿部模型实时显示被测者的腿部运动,实现肢体的同步运动和在线检测。
[参考文献]
[1] 王晓敏,周敏.步态分析在临床疾病中的应用[J].湖北中医杂志,2015,37(8):66-68.
[2] 向静.步态分析在临床康复应用中的研究进展[J].现代医药卫生,2014,30(22):3411-3413.
[3] 卢利萍,桑德春,邵翠霞.脑卒中偏瘫患者康复治疗前后的三维步态分析[J].中国康复理论与实践.2014,20(8):752-755.
[4] 崔大平,赵德伟,孙强,等.踝关节重建手术前后的步态分析[J].中国矫形外科杂志.2013,21(4):373-377.
[5] 赵凌燕.人体步态模型实验研究[D].哈尔滨:哈尔滨工程大学,2008.
[6] 李晓丹,肖明,曾莉.人体动作捕捉技术综述以及一种新的动作捕捉方案陈述[J].中国西部科技,2011,10(15):35-37.
[7] 蹇彪.基于惯性传感器的人体运动姿态三维重构[D].哈尔滨:哈尔滨工程大学,2013.
[8] 高维松.一种基于立体测量的运动数据采集方法设计与实现[D].杭州:浙江大学,2010.
[9] 徐展.人脸表情运动捕捉移植的研究[D].北京:北京交通大学,2009.
[10] 于在宇.基于电磁场理论的医用三维定位系统研究[D].哈尔滨:哈尔滨工业大学,2009.
[11] 任家峪.基于磁传感器阵列的无线跟踪定位技术及其应用研究[D].重庆:重庆大学,2010.
[12] 刘金寿,戎绍金.电流环与磁偶极子等效变换中的磁荷计算[J].辽宁师范大学学报(自然科学版),2003,26(4):442-443.
[13] 黄波.基于磁传感器阵列的微弱磁性目标定位的研究[D].武汉:武汉工程大学,2012.
[14] Schlageter V,Besse PA,Popovic RS,et al.Tracking system with five degrees of freedom using a 2D-array of hall sensors and a permanent magnet[J].Sens Actuat,2001,92(1-3):37-42.
[15] Hu C,Li M,Song S,et al.A Cubic 3-axis magnetic sensor array for wirelessly tracking magnet position and orientation[J].IEEE Sens J,2010,10(5):903-913.
[16] 王丹琦,黄根春,孙小刚.16位串行模数转换器ADS8509及其应用[J].电子设计工程,2011,19(14):190-192.
本文编辑 袁隽玲
Design of a Three-Dimensional Leg Motion Detection System Based on Permanent Magnet Positioning Technology
ZHANG Ke, TANG Funan, LI Xiuhan, WU Xiaoling
School of Biomedical Engineering, Nanjing Medical University, Nanjing Jiangsu 210029, China
Abstract:ObjectiveTo design a kind of three-dimensional leg motion detection system based on permanent magnet positioning technology to achieve real-time display of leg motion.MethodsFirstly, the three-axis magnet sensors were placed on the leg joints, and the small magnets were placed on the limbs which were connected to the leg joints, while the distance between the sensor and magnet was about 6 cm. The sensors were used to detect the magnetic induction intensity. The signal was gradually exaggerated and filtering processed, and was sent via the serial port to PC. Secondly, the magnetic induction intensity of the signal was converted into a voltage signal by LabVIEW software, and the voltage signal was combined with LM algorithm and PSO algorithm and was used for magnet source localization.ResultsThe experiment for detection range of Magnetic sensor showed that when the distance between the sensor and magnet was about 6 cm, it could be considered as a magnetic dipole model and had no effect on the near magnet group. When the magnets were positioned within the average error of 1 cm, the entire system spent about 17.5 ms on finishing a complete data collection, which could basically meet the real requirements. The experiment for three-dimensional leg motion showed that the result was consistent with the examinee leg stance.ConclusionThe three-dimensional leg motion detection system based on permanent magnet leg positioning technology can achieve three-dimensional leg motion detection function, which provides a new method for detecting gait and leg rehabilitation training.
Key words:motion detection; permanent magnet positioning; three-axis magnet sensors; positioning algorithm
[中图分类号]TH789
[文献标识码]A
doi:10.3969/j.issn.1674-1633.2017.09.008
[文章编号]1674-1633(2017)09-0033-07
收稿日期:2016-10-09
修回日期:2016-11-09
基金项目:江苏省2015年度普通高校研究生科研创新计划项目(KYLX15_0938)。
通讯作者:吴小玲,教授,主要研究方向为生物医学工程(纳米材料方向)。
通讯作者邮箱:bmewxl@163.com