面向医疗卫生的无线传感器网络节点定位技术的研究进展
李洪凤a,魏德健a,张俊忠b,曹慧a
山东中医药大学 a.理工学院;b.第一临床学院,山东 济南 250355
[摘 要]在医疗卫生中使用无线传感器网络节点定位技术可以在较短的时间内实现对人员和医疗物资的定位。然而,在节点定位过程中测量误差、能耗等问题严重降低了定位的精确度。本文介绍了基于三边测量法的定位法、基于双曲线法的定位算法、基于三角测量法的定位法、基于三维空间的质心算法和基于球壳交集的传感器网络三维定位算法,分别针对二维平面和三维空间内的节点定位技术进行了分析比较,指出其中的不足,并总结了改进的方法。
[关键词]无线传感器;节点定位;二维平面;三维空间
无线传感器网络节点定位技术可应用在多种领域。在医疗方面,将节点定位技术应用到医护人员定位、医疗设备定位、药品物资监管、患者识别、母婴管理、特殊患者管理等方面,尤其是在重大灾害发生后,使用定位技术在较短时间内完成对人员及物资的准确定位,不仅能提高治愈率,还能有效缓解医务人员的压力及紧张的情绪。
我国相较于其他国家在无线传感器网络定位方面的研究起步较晚[1]。根据是否测距可以将节点定位分为基于测距(Range-based)技术的定位和无须测距(Range-free)技术的定位[2]。无线传感器中的节点包括未知节点、信标节点。其中未知节点是位置信息不知道的节点;信标节点也称锚节点或参考节点,是自身位置信息已确定的节点,可用来确定未知节点。信标节点的定位通常依赖人工部署或全球定位系统(Global Positioning System,GPS)定位[3],人工部署消耗人力大,花费时间久;GPS定位系统消耗大,成本高,只适用于室外,因此在实际应用中信标节点远少于未知节点。
1 基于测距技术的定位法
基于测距技术的定位使用信号强度指示(Received Signal Strength Indicator,RSSI)、信号传输到达时间(Time of Arrival,TOA)、信号传输时间差(Time Difference ofArrival,TDOA)和信号传输角度(Angle of Arrival,AOA)等蜂窝网无线定位测距技术测量距离和角度,使用三边测量法、三角测量法或最大似然估计法[4]得到节点坐标。以对医护人员的定位为例,根据医护人员所佩戴的节点(以下统称为医护人员),即未知节点,与多个基站(Base Station,BS)之间信号传输参数计算出医护人员的位置坐标。
1.1 基于三边测量法的定位法
三边测量法[5]是通过RSSI或TOA测距技术得到3个信标节点分别与未知节点的距离,再通过三边测量法得到未知节点的位置信息。
1.1.1 测距技术
(1)RSSI测距技术:节点之间信号传输时,信号强度随距离的增大有规律地衰减[6],据此,由已知的发射信号时的信号强度和接收信号时的信号强度可计算信号强度的损耗,继而使用信号传输模型将损耗转化为距离。由于信号传输还受到其他因素如障碍物的影响,实际使用中,较常使用由损耗模型和对数正态分布模型组成的Shadowing模型[7-9]。
(2)TOA测距技术:TOA测距技术通过测量信号在2个节点间传播的时间,根据已知的信号在空中的传播速度可估计出节点间的距离[10-11]。BS1、BS2、BS3为位置信息已知的基站,通过测量医护人员发射的信号分别到达3个基站的时间,以及信号在空中的传播速度,可以计算出医护人员与3个基站的距离R1、R2、R3。
1.1.2 基于二维平面的三边定位算法
得知距离后,使用三边测量法计算未知节点的位置坐标。分别以基站为圆心,以R1、R2、R3为半径可以得到3个圆,理论上3个圆相交得到的点就是待定位节点,通过几何关系计算得到医护人员的位置坐标(图1)。

图1 基于二维平面三边定位算法模拟图
在三边测量法中,理想情况下3个圆会交于一点,即待定位节点。但实际情况会因测量误差导致3圆不交于一点,产生一个区域,此时求得的解为以A、C为圆心的圆相交点所在直线与以B、C为圆心的圆相交点所在直线的交点[12],内、外交集区域求解图,见图2和图3。张华[13]提出了一种借助虚拟信标节点定位算法。将处于该交集区域的由所有的圆两两相交得到的点称作虚拟锚节点,未知节点处在虚拟锚节点所在的区域中,通过平面几何关系求出虚拟锚节点的坐标,虚拟锚节点与未知坐标之间的距离差越小则越接近未知坐标的真实值,使用该标准计算未知节点坐标。该种算法提高了定位的精确度,但在计算中需要多次使用角度关系、平面关系计算多个虚拟锚节点的坐标,再计算未知节点的坐标,计算量的增大会耗费能量。
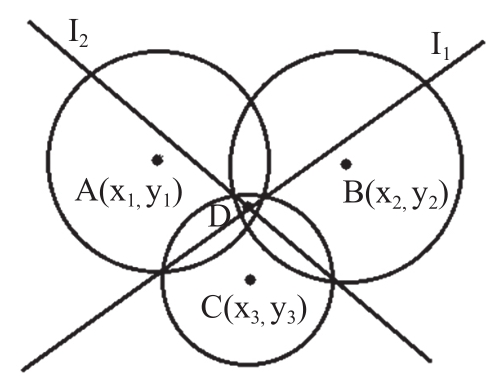
图2 内交集区域求解图
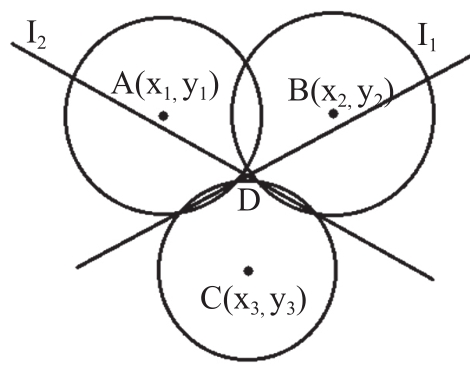
图3 外交集区域求解
三边测量法原理简单,计算难度小,但是易出现较大误差。李俊等[14]通过误差分析得到,若信标节点位置近似直线则误差变大。增加信标节点的数量可以提高定位准确性,但信标节点的增多会导致成本增大及网络拥塞。改进的算法在不增加信标节点的前提下,将已经定位成功的未知节点升级为信标节点来定位其他未知节点[14]。在定位未知节点时会产生一定误差,在信标节点的升级中会产生误差积累,为减少误差积累,引入权值,从而提高了定位成功率。误差的出现不仅与信标节点代数有关,还涉及距离和信号强度差异等。熊志广等[15]使用加权三边测量定位,通信质量越好的节点权值越大。为减少误差积累,可以考虑基于通信质量结合信标节点的代数引入权值,提高定位精确度。
1.1.3 基于三维空间的三边定位算法
在三维空间中定位一个未知节点至少需要4个非共面的信标节点。分别以4个信标节点为球心,以各自与未知节点的距离为半径作球,理想情况下,4个球相交于一点,即待定位的未知节点(图4)。
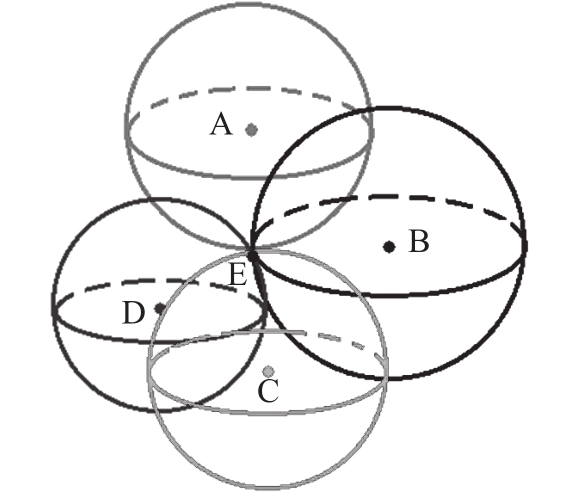
图4 基于三维空间三边测量法模拟图
在基于RSSI技术的定位中,由于存在测量误差,4个球很有可能不交于一点。采用RSSI技术测距时,若未知节点接收到的信号少且距离远就会产生较大误差。为了减少误差,杜巧玲[16]采用最小二乘法对数据进行处理。最小二乘法,简单的说就是一种数学优化技术,能使求得的数据误差达到最小。朱晓娟等[17]提出3DL-RD算法,先将信标节点投影到与未知节点同一高度的水平面,使用RSSI测距,利用三边测量法在二维平面上定位,根据高度实现三维定位。此方法根据矿井环境设计,信号易受环境影响,RSSI测距时易产生误差。Zhang等[18]提出Landscape-3D空间定位算法。采用位置助手(Location-assistant,LA)装置周期性广播自身位置信息,未知节点通过接受这些信息并通过RSSI测量自身与LA之间的距离来确定位置信息。定位过程对LA装置的要求较高,并需要大量计算,但节点间无需通讯,且耗能少。
1.2 基于双曲线法的定位算法
基于双曲线法的定位算法采用TDOA测距技术。TDOA是指医护人员节点同时发送2种不同信号,根据基站接收信号的时间差和信号传输速度估计出距离差。
若基站BS1、BS2与医护人员的距离差为R21,则可以推断医护人员位于以BS1、BS2为焦点,与2个焦点的距离差为R21(R21=R2-R1)的双曲线上,同样的道理又可得到以BS1、BS3为焦点,与2个焦点的距离差为R31的双曲线,双曲线的交点即为医护人员的位置。通过计算会得到2个解,再根据时间差t21的极性可以得到正解[19](图5)。TDOA是在TOA基础上改进的,无需考虑时间是否同步,定位精度较高。
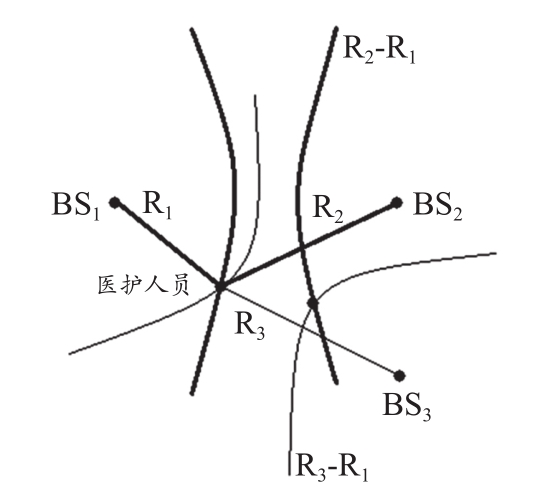
图5 基于双曲线法的定位算法模拟图
1.3 基于三角测量法的定位法
使用AOA技术测量信号到达入射角(利用阵列天线或多个超声波接收器[20]得到未知节点发射到基站的信号入射角θ1、θ2),再通过已知的基站的位置信息,使用三角测量法利用平面几何关系求得医护人员的位置信息(图6)。

图6 基于三角测量法模拟图
丁少文等[21]应用三角测量法实现对移动机器人的定位。使用基于扩展卡尔曼滤波(Extended Kalman Filter,EKF)的方法完成对机器人移动过程中相对角的动态估计。传感器P由纵向速度方向逆时针扫描,遇到信标节点(L1、L2、L3)就记录,得到3个相对角。以(θ1、θ2、θ3)作为状态向量,推导出角度的变化规律,经过估计阶段和校正(更新)阶段实现动态估计(图7)。该方案在定位的开始阶段误差较大,需要一定时间收敛,对于精度要求较高的定位实验可行性不高。
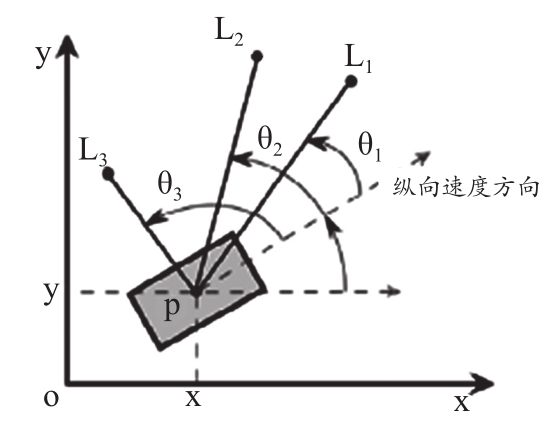
图7 机器人定位模拟图
2 基于非测距技术的定位算法
2.1 基于三维空间的质心算法
信标节点每隔一段时间就向邻居节点广播一个信号,当未知节点接收到不同的信标节点发来的信号且数量达到一定值时,未知节点就可以确定自身位置处在这些未知节点组成的多边形的质心[22]。该方法耗能少,易实现,但容易产生较大误差,未知节点的邻居节点密度越大,则精确度越高。
李娟等[23]提出改进的质心算法,根据接收到的信号确定一个包含未知节点在内的立方体,并计算质心坐标。占宏等[24]提出三维加权质心算法,距离未知节点越近,信标节点的加权因子越大,以此提高定位精确度。在第二节中已经提到三边测量法中存在无解的情况,高雷等[12]提出了基于三边测量法和质心算法的节点定位算法。3个圆相交产生一个区域,计算所围区域的质心,估算出未知节点的坐标,该定位算法较三边测量法准确度更高。三边质心算法需要节点分布均匀,信标节点需位于未知节点的外侧且多于3个,在较为复杂的环境中,尤其是在山区或者重大灾害现场,保证节点分布均匀不太容易实现。
2.2 基于球壳交集的传感器网络三维定位算法
吕良彬等[25]提出基于球壳交集的三维定位算法(Approximate Point In Sphere,APIS)。将一个信标节点作为球心,将其与其他信标节点的距离为半径作球体,得到多个同心球体,待定位的节点采用RSSI技术通过监听信号强度判断自身是否在某个球体区域中,最终找到包含未知节点在内的最薄的一层球壳。以不同的信标节点为球心得到多个同心球,找到一系列这样的球壳,将所有最薄球壳相交得到一个区域,取该区域的重心坐标作为未知节点位置坐标(图8)。该算法只需信标节点广播2次信息,其余节点无需广播,节省消耗,但是如果信标节点本身距离较远,那么最后得到的所谓“小区域”有可能会比较大,会降低准确率。

图8 基于球壳交集的三维定位算法模拟图
3 总结
大多数基于测距的三维定位算法是在二维平面定位算法的基础上推广出来的,为了在三维空间中能更好地实现定位,采用了引入新的参考变量、算法加权等措施减少误差,通过简化算法或者升级信标节点等方式减少能耗,借助硬件设备、结合多种算法提高定位精确度。尤其是加权的使用,可以综合考虑对误差影响的程度,结合多种因素加权值[26]。在重大灾害后或偏远地区对人员和医疗物资的定位不仅需要快速准确,还需实现动态定位。对节点的动态定位可采取每隔一段时间定位一次,使用优化算法得到运动规律,估算运动轨迹进而定位。
[参考文献]
[1] 王鑫.无线传感器网络三维节点定位优化算法研究[D].济南:山东大学,2014.
[2] 张苍松.基于RSSI的室内定位算法优化技术[D].西安:西北大学,2014.
[3] 钟智.具有移动节点的无线传感器网络定位算法和数据收集协议研究[D].长沙:中南大学.2012.
[4] 孙健,杜永贵.RSSI-神经网络在无线传感器网络定位中的应用[J].科学技术与工程,2013,13(6):1479-1482.
[5] Thomas F,Ros L.Revisitingtrilateration for robotlocation[J].IEEE Transactions on Robotics,2005,21(1):93-101.
[6] 彭玉旭,杨艳红.一种基于RSSI的贝叶斯室内定位算法[J].计算机工程,2012,38(10):237-240.
[7] 王琦.基于RSSI测距的室内定位技术[J].电子科技,2012,25(6): 64-67.
[8] 王振朝,张琦,张峰.基于RSSI测距的改进加权质心定位算法[J].电测与仪表,2014,51(21):63-66.
[9] 赵昭,陈小惠.无线传感器网络中基于RSSI的改进定位算法[J].传感技术学报,2009,22(3):391-394.
[10] 孙继平,李晨鑫.基于TOA技术的煤矿井下人员定位精度评价方法[J].煤炭科学技术,2014,42(3):66-68.
[11] 戴欢.无线传感器网络定位算法及其应用研究[D].无锡:江南大学,2012.
[12] 高雷,郑相全,张鸿.无线传感器网络中一种基于三边测量法和质心算法的节点定位算法[J].重庆工学院学报(自然科学),2009,23(7):138-141.
[13] 张华.无线传感器网络的三边定位改进算法[J].集美大学学报(自然科学版),2012,17(6):475-480.
[14] 李俊,张百海.无线传感器网络三边测量定位算法的分析与改进[J].计算机科学,2009,36(10):53-81.
[15] 熊志广,石为人,许磊,等.基于加权处理的三边测量定位算法[J].计算机工程与应用,2010,46(22):99-102.
[16] 杜巧玲.无线传感器网络三维节点定位问题的研究[D].长春:吉林大学,2009.
[17] 朱晓娟,王军号,孟祥瑞.煤矿井下无线传感器网络节点三维定位算法[J].计算机应用,2012,32(4):927-931.
[18] Zhang NL,Zhou NX,Cheng NQ.Landscape-3D:A Robust Localization Scheme for Sensor Networks over Complex 3D Terrains[J].IEEE Conference on Local Computer Networks,2006:239-246.
[19] 吴逢吉.无线定位TOA/TDOA参数估计方法的研究[D].长春:吉林大学,2006.
[20] 戴欢.无线传感器网络定位算法及其应用研究[D].无锡:江南大学,2012.
[21] 丁少文,王林.基于连续三角测量法的机器人定位方法[J].微型电脑应用,2013,30(5):9-12.
[22] 张华,王万良.改进质心算法的节点自定位研究[J].现代电子技术,2009,16:143-145.
[23] 李娟,王珂,卢长刚.一种基于无线传感器网络节点三维定位算法[J].中国海洋大学学报,2009,39(6):1265-1268.
[24] 占宏,黎善斌,胥布工.基于WSNs中距离函数和指数函数的三维质心定位算法[J].传感器与微系统,2011,30(5):136-138.
[25] 吕良彬,曹阳,高洵,等.基于球壳交集的传感器网络三维定位算法[J].北京邮电大学学报,2006,29:48-51.
[26] 包秀珠,严红燕,王健,等.基于无线传感网的自动肠内营养系统的设计[J].中国医疗设备,2014,29(12):115-118.
Research Progress of the Health-oriented Node Localization Technology with Wireless Sensor Network
LI Hong-fenga, WEI De-jiana, ZHANG Jun-zhongb, CAO Huia
a.Institude of Science and Technology; b.First Clinical College, Shandong University of Traditional Chinese Medicine, Jinan Shandong 250355
Abstract:Application of the node localization technology with wireless sensor network (WSN) in health care can realize the localization of medical personnel and supplies in a short time. However, problems such as measurement error, energy consumption and other issues involved the process of localization severely decrease the accuracy of positioning. This paper introduced the location method based on threesided measurement, hyperbole method, and triangulation method. The node localization technology used in two-dimensions and three-dimensions are analyzed respectively and compared. Then some deficiencies are pointed out. Method for improvement was summarized.
Key words:wireless sensor; node localization; two-dimensional plane; three-dimensional space
[中图分类号]TN929.5;TP212.9
[文献标识码]A
doi:10.3969/j.issn.1674-1633.2016.03.019
[文章编号]1674-1633(2016)03-0080-04
收稿日期:2015-05-28
修回日期:2015-08-03
基金项目:国家自然基金项目(No.81473708;No.81373661);山东省高校科研发展计划项目(No.J15LN21)。
通讯作者:曹慧,硕士生导师。