手外骨骼康复技术研究进展
陈学斌1,高海鹏1,刘文勇2,高敏1,安峥1
1.中日友好医院 医学工程处,北京100029;2.北京航空航天大学 生物与医学工程学院,北京 100191
[摘 要]手功能损伤严重影响人们的日常生活,中风是引起手部功能损伤的重要原因。目前对中风后患手功能恢复主要依赖于医护人员的手动训练,手部外骨骼作为一种手部功能自主训练的康复辅具逐渐受到关注。本文总结了手部外骨骼的国内外研究进展,分析了目前手部外骨骼常见的结构组成、驱动模式及控制模式等,以期对手部外骨骼的康复技术发展提供一些技术支持。
[关键词]手外骨骼;康复辅具;控制模式;驱动模式;自由度
0 前言
中风是导致人类死亡的主要原因,更是导致患者致残的首要原因。手功能损伤在中风后幸存患者中较为常见,中风后为恢复手的功能需要患者进行高强度持续性的康复训练。研究显示持续高强度的重复训练可以提高中风后患者手部肌肉的力量,有助于手部功能的恢复[1]。目前对手功能的康复治疗主要是依靠医护人员的手动治疗方式,手外骨骼这种既能满足患者康复治疗的需求,又能使患者自主进行康复训练的康复训练装置引起了人们的关注。
手部外骨骼是一种固定于人手上的主动控制的机械驱动系统,能够带动手指同步活动,而手指和外骨骼受力运动的过程是互相反馈,相互变换的[2]。手部外骨骼可以协助患者进行重复性的手指康复训练,在此过程中手部外骨骼可以通过不同的控制模式带动手指实现不同自由度的动作以达到康复训练的目的。研究显示利用手外骨骼进行手的康复训练能够明显提高中风后患者手部功能的恢复[3]。本文从中风后手部功能损伤及康复治疗方式为切入点,从手外骨骼的结构及控制模式等方面介绍了目前国内外手外骨骼的研究现状及存在的问题。
1 手部功能损伤及康复训练
1.1 手部功能损伤及康复治疗需求
手是人体重要的组成器官,人手由27块骨骼组成,可以实现20个自由度的活动。食指、中指、无名指和小指由3个关节组成,分别是远端指关节、近端指关节和指掌关节,这3个关节能够实现伸展、弯曲2个自由度,指掌关节还能够实现内收和外展2个自由度。拇指也是有3个关节组成,分别是指关节、指掌关节和腕掌关节,其中指关节和指掌关节能够完成伸展和弯曲2个自由度,腕掌关节同时能够实现内收和外展2个自由度。这样每个手指都能完成4个自由度的活动,因此人的整个手能够完成20个自由度的活动[1-2]。对物体的操纵和触觉感知是人手的2大重要功能。手对物体的操纵功能主要是指手在骨骼、肌肉和神经系统的共同作用下完成对物体抓握、捏取以及对精细动作控制的能力[5]。手部功能的损伤严重影响人们的日常生活。外力、烧伤以及疾病等多种原因都能够导致人手功能的损伤,其中由于中风引起的人手功能损伤最为常见。
世界卫生组织的报告显示全球每年新发中风患者有1500万,其中有500万患者死亡,幸存者会出现失明、失语、半身瘫痪以及思维混乱等后遗症,其中500万患者会导致永久性的残疾,给家庭和社会造成沉重负担[3-4]。目前中风后的康复治疗重点是对患者的步行能力和日常生活能力中独立活动能力的训练,而往往忽略了患手和上肢功能的锻炼,患手恢复的潜能无法得到充分的发挥,而患手功能恢复关系到患者的预后和生活质量。据统计显示在中风6个月后,有65%的患者患手功能缺失,不能进行日常操作,需要进行患手手部功能的康复训练[6]。对患者进行手部功能的康复训练可以提高患者独立生活能力,提高患者的自我认可程度,使患者更容易重新融入社会。
1.2 手功能损伤的康复治疗方案
中风后患者手部功能的损伤状态可以分为2大类:① 手指处于挛缩状态,此种情况下手部肌肉的挛缩和形态学上的改变导致患手一直处于弯曲状态,手指伸展肌肉无力使手指无法伸展,这是中风后手部功能的主要表现类型;② 手指的强制状态,此种情况下患者腕部关节的活动范围小,患手指处于伸直状态[5]。人手的解剖结构复杂,组织结构精密,手部功能精细,因此中风后手部功能的恢复需要长期的康复训练。目前的手部康复训练措施对医护人员的依赖程度较大,需要医护人员的手动辅助。
鉴于目前医疗资源的限制及康复成本压力,且中风后患者一般会出现行动不便等症状,因此迫切需要一种能够辅助患者进行手部功能训练的自主训练装置。利用手外骨骼这种康复训练装置对受损伤的手进行康复训练是一种很有前景的康复方式。手外骨骼通过模拟人手的活动带动手指的活动,进而实现对患者患手的康复训练,实现手指功能的恢复[7]。根据使用功能不同可将手部外骨骼分为康复性外骨骼和辅助性外骨骼。康复性手部外骨骼可专门用来对手部进行锻炼,是以恢复手部功能为目的的一类外骨骼;辅助性手部外骨骼是用于支持手部功能损伤的患者进行日常手部操作的设备,辅助性手部外骨骼也可以作为康复性外骨骼进行使用。
2 目前手部外骨骼的国内外研究现状
手部外骨骼的研发始于20世纪90年代,其来源于工业机械手的研制,随着技术的进步及研究的深入,手外骨骼的结构和功能都经历由简单到复杂的过程。早期的手部外骨骼是一种主动控制的手部矫形器,只具有1个自由度的活动[8]。日本科学家L.Turki在1995年研制的LRP Master Hand手部外骨骼是一种远程控制的外骨骼,该外骨骼的运动轨迹由1个角度传感器来测定[9]。1997年日本的T.Kitada等研制的手部外骨骼可以实现多个自由度的活动[10]。同年美国田纳西州立大学的研究人员研制的手外骨骼可辅助宇航员在电机的带动下完成抓握与伸展动作[11]。早期的外骨骼设计相对简单,能够控制手部活动的自由度较少,对手指活动轨迹的控制与监控较弱。2000年以后,手外骨骼的研究逐渐引起人们的关注,越来越多设计精密、功能完善的的手部外骨骼被研制出来。德国的A.Wege等研制的手部外骨骼通过手部16块肌肉来控制外骨骼的运动,可实现手部20个自由度的活动[12]。2007年在第十届国际康复机器人大会上,Worsnopp等汇报了一种针对食指康复的手部外骨骼,该设备能够模拟食指3个自由度的活动,且安装有角度和压力传感器在保护手指的情况下能够更好的控制外骨骼的活动[13]。2009年在日本举办的国际机器人与自动化大会中,Fontana等提出了一种针对食指和拇指功能恢复的外骨骼,该外骨骼能够实现食指3个自由度的活动,拇指3个自由度的活动,并且在指端安装有双向力传感器在手指的抓握物体时会产生力学反馈作用[14]。2010年日本东京工业大学研制的手部外骨骼使用肌电控制模式,通过气动橡胶肌肉来驱动手指的活动,能够实现手部10个自由度的活动[15]。2015年美国伊利诺伊大学芝加哥分校的科研人员发现利用手部外骨骼对患者的患手进行康复训练,能够明显提高患手的活动范围及灵活度,具有较好的康复训练效果[3]。
近年来,我国手部外骨骼的研究也取得了一些进展,在外骨骼的位置控制及活动自由度等方面都有不错的表现。我国哈尔滨工业大学2008年研制的针对食指康复训练的手部外骨骼可以实现食指弯曲伸展、内收外展等动作,在该外骨骼上安装有多种位置传感器和压力传感器,能够保障外骨骼的正常运行和手指的安全[7,16]。南京大学2009年报道的手部外骨骼是一种针对单个手指的康复训练装置,该外骨骼通过气动系统提供动力。在外骨骼的传动装置上安装有4个位置传感器,在外骨骼与手指的接触点上具有双向的力学传感器,利用该外骨骼可以直接进行单手指的康复训练或在虚拟端进行虚拟控制训练[17]。北京航天航空大学2011年报道的手外骨骼主要针对食指和拇指进行康复训练,在外骨骼的每个指关节处都装有角度传感器,控制外骨骼的动作,在指端装有力学传感器,可以进行力学的虚拟反馈,该外骨骼可以模拟食指和拇指各自4个自由度的活动[18-19]。
3 手外骨骼的结构及控制模式
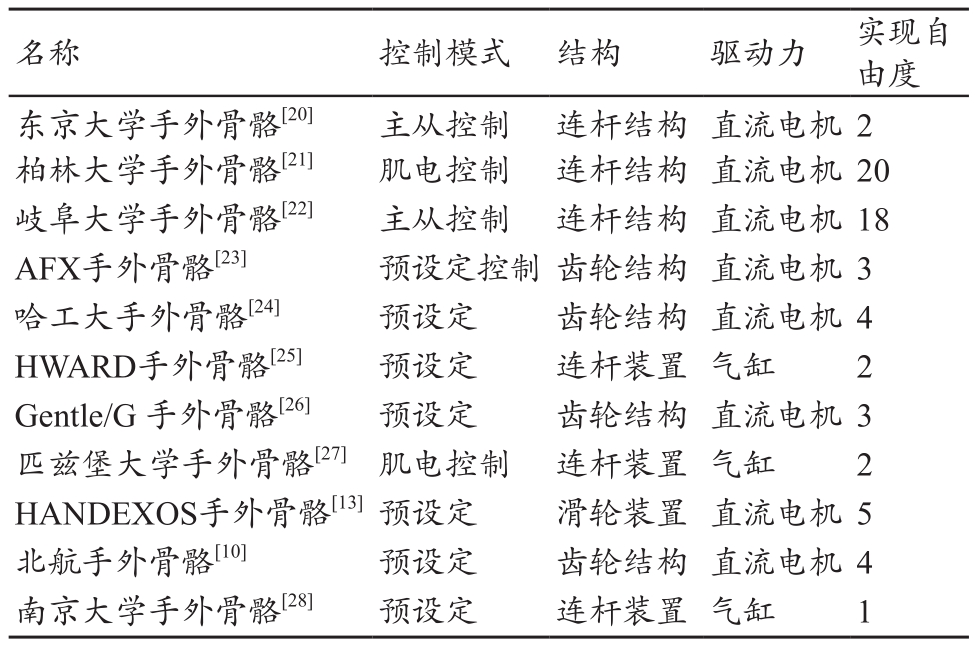
目前手部外骨骼的研究逐渐增多。不同的外骨骼在控制模式、传感器、结构、驱动模式及其实现的功能等方面各有不同。目前常见的手外骨骼,见表1。
表1 目前常见的手外骨骼
3.1 手外骨骼的控制模式
目前对于手部外骨骼的控制模式主要可分为3大类:① 主从控制模式;② 生物电控制模式;③ 预先设定模式。传感器是对手外骨骼的控制模式的重要反馈,能够保障外骨骼功能的实施及手指的安全。
3.1.1 主从控制模式
主从控制模式中手部外骨骼分别位于“主动手”和“从动手”上,“主动手”的操纵带动其上外骨骼的活动,与此同时位于“从动手”上的外骨骼重复主动手上外骨骼的活动轨迹,从而带动从动手的活动。在中风后手部的康复训练中以未受影响的手为主动手,以患手为从动手,主动手的活动带动从动手的活动,以达到康复训练的目的。日本东京大学的H.Yamaura等研制的手部康复外骨骼中就使用了该模式,在主动手的控制模块中安装了位置传感器,主动手手指的活动带动其上位置传感器的活动,位置传感器将手指的运动轨迹传输给从动手外骨骼的控制电机,通过电机的转动带动从动手手指的活动,进而协助患手完成手指的伸展和弯曲动作[29-30]。日本岐阜大学H.Kawasak等2007年研制的针对手部功能康复使用的手部外骨骼也是主从式控制,相较于其他的手部康复外骨骼而言,该设备能够实现手部18个自由度的活动,同时该外骨骼通过力传感器检测手指和外骨骼之间的相互作用力,对手指能够起到保护作用,但是该外骨骼的体积较大,重量较沉,患者的使用舒适度不佳[20,31]。日本九州大学的Jumpei等2014年研制的橡胶手也是一种主从控制的手部外骨骼,在主动手外骨骼上安装有角度和位移传感器,通过测定主动手手指位移的变化来控制从动橡胶手手指位移的改变,该设备的从动装置也能够作为手部外骨骼控制手指的活动[32]。研究表明,中风后双手的同时康复训练与单手康复训练相比,手指活动的协调性会更好,手指活动的幅度明显增大[21]。因此主从模式的训练可能对中风后患者的治疗具有较好的应用前景。
3.1.2 生物电控制模式
生物电信号控制模式首先是外骨骼从机体的脑部或手部获得肌肉活动的生物电信号,通过对生物电信号的分析获得手指动作的意图,进而将指令传输给手部外骨骼的控制电机,通过电机的运转带动患手的活动。Benjuya等于1990年首先研制出了一种能够利用手部肌电信号控制的手部矫形器,但该矫形器只能对手指实现一个自由度的动作[33]。德国柏林工业大学于2006年研制的依靠肌电信号控制的手部外骨骼,该外骨骼有16个关节,能控制除拇指外的其他4个手指的16个自由度的活动[34]。香港理工大学2011年研制的手部康复训练外骨骼是通过检测拇指短肌和伸指总肌的肌电信号来控制外骨骼的伸展和弯曲动作。该手部外骨骼能按照使用者肌电图信号的强弱设定控制阈值,研究者对8个中风受试者每周进行3~5个周期的训练,总共完成20个周期的运动训练后,研究者发现患者的手部运动功能得到了明显提高[35]。Jimson等在2013年完成一种依靠手部肌肉肌电控制的手部外骨骼系统,本研究中研究者首先用角位移传感器测定分析正常手指在弯曲和伸展一定角度时的肌电信号,通过正常手活动的肌电信号控制中风患者患手手部外骨骼的弯曲和伸展的角度,进而实现对患手的康复训练[36]。德国的Soekadar等研制的手部康复辅助外骨骼是利用脑电信号与眼部肌电信号的共同作用控制的,研究者发现该控制模式能够增强患者利用手部外骨骼辅助患者进行日常操作的适应性[37]。生物电信号控制的外骨骼因为其控制模式由生物电信号控制符合人体的生理机能,因此是一种很有应用前景的控制模式,但也有其局限性,由于生物电检测是非创伤性的,而控制手部活动的肌肉相互之间是互相重叠的,因此无法对手指活动的所有肌肉或脑部的信号进行采集及分析鉴别,因此外骨骼动作的灵活性会受限制。
3.1.3 预先设定及虚拟触觉交互控制模式
预先设定控制模式是目前研究较多的外骨骼控制模式。预先设定是指在进行康复训练时已预先设定好外骨骼的运动路径,通过外骨骼的活动带动手部的活动[9]。该模式能够提高患者训练的趣味性,增加患者主动参与的主动性。哈尔滨工业大学的手部外骨骼系统[16]以及北航的手部外骨骼系统[19]都采用了预先设定的控制模式。Sergei等的手部外骨骼系采用了预设定控制模式,在康复训练中通过虚拟端设备模拟手部的弯曲动作、弹琴及力量测试等任务。研究者选择了8位中风后手部功能损伤的患者进行康复训练,结果显示经过一段时间的训练后,研究者发现受试者手指的活动范围和活动速度均有所提高,在临床测试中患者完成任务的时间有明显降低[38]。美国伊利诺伊大学的手部外骨骼也是预设定控制模式,其利用手部外骨骼的虚拟端进行日常生活用品的操作任务训练,如倒水、取食等任务,训练1个月后6名受试者虚拟操作的能力增强,临床检测也显示患者手指的灵活性增强[3]。预设定模式的优点是对手部活动的控制简单,易于实现,稳定可靠,且重复性好,但缺点是该模式的动作固定,患者手指的活动是一种被动活动过程,降低了患者参与康复训练的主动参与性。
3.2 传感器对手外骨骼的控制反馈
传感器是手外骨骼控制反馈的重要组成部件,其不仅能够调控反映外骨骼完成动作的状态而且能够保障手指的安全。随着手外骨骼功能的越来越复杂,对其进行外骨骼进行监测的传感器的类型和功能也在增多。功能简单的手外骨骼只含有一种传感器,如日本东京大学H.Yamaura等研发的手外骨骼系统只含有1个位置传感器,该外骨骼的缺点是没有压力传感器,无法检测手外骨骼对手指的施力情况,容易造成手指的损伤[34]。常规手外骨骼有2种传感器,位置传感器和压力传感器,其中位置传感器可以监控外骨骼的活动位置,也可以检测电机的转动力矩;压力传感器可以检测外骨骼对手指所受的压力,也可以监测动力传动装置对外骨骼所施加的力量。功能更复杂的的手外骨骼会含有多种类型的传感器,如柏林大学研制的通过肌电模式控制的手外骨骼含有5种不同的传感器,分别是两种角度测量传感器、压力传感器、肌电描记器传感器和电流传感器。在该手外骨骼中肌电描记器传感器通过从控制手部活动的肌肉中获取肌电信号来控制手外骨骼的活动;两种角度测量传感器分别通过测量外骨骼的活动角度和驱动外骨骼运动的电机的转动角度来监控外骨骼的活动位置;在外骨骼每个手指都有6个压力传感器,分别位于手指指节与手外骨骼接触的部位的上方和下方,可以监测手外骨骼对手指所施加的压力。电流传感器用来监测驱动手外骨骼活动的电机中的电流,通过对电流的分析可以获得电机扭矩的变化进而也可以推算出电机对外骨骼所施加的力量[39]。传感器的使用使得手外骨骼的控制更加精细,使用更加安全。
3.3 手外骨骼的机械结构及驱动模式
外骨骼是固定于手部的驱动手指活动的机械系统,由于手部的骨骼多且小,因此手部外骨骼的结构设计相对复杂,目前常见的手部外骨骼的机械结构主要是连杆装置、滑轮机构及齿轮装置等。直流电机系统控制的驱动装置和气动系统控制的驱动装置是目前手部外骨骼活动的动力来源。
3.3.1 连杆装置
连杆装置是外骨骼的结构中最常见的应用机构。L.Turki等在1995年研制的手部外骨骼就是一种由直流电机驱动的四连杆机构组成的的手部外骨骼,该外骨骼能够实现人手的14个自由度[24],四连杆机构手外骨骼结构[20],见图1。T.Kitada等在1997年研制的手部外骨骼是一种连杆装置的曲柄滑块结构的,该外骨骼能够完成20个自由度的活动[10]。意大利米兰大学2005年时研制的手康复外骨骼[40],是通过连杆装置将四个手指固定在一起,由直流电机带动手指的活动。Frisoli等于2007年研制的食指康复外骨骼是一种六连杆装置,通过电机驱动外骨骼的伸展活动带动食指的运动[41]。我国南京大学2009年研制的触觉虚拟交互模式的外骨骼是连杆结构的,该外骨骼通过一个四连杆机构与手指相连,由气动系统提供动力来驱动外骨骼的运动,进而带动手指的运动[17]。北京航空航天大学2012年报道的针对食指康复的手部外骨骼是基于连杆装置构成的,通过电机的驱动其能够实现食指全部4个自由度的活动[42]。Nasi?owski等2014年设计的一种手部外骨骼通过连杆机构控制手指活动[43]。连杆装置的结构简单,活动灵活,但是连杆装置在手指自由度实现方面往往受到限制,且连杆装置的外骨骼体积相对较大。
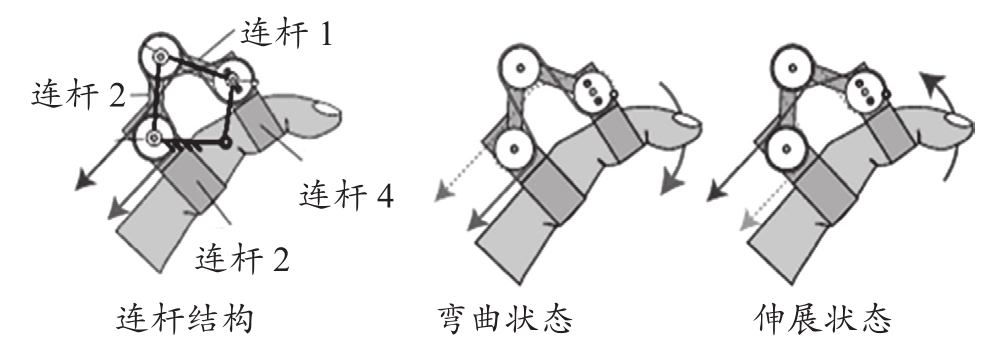
图1 四连杆机构手外骨骼结构[20]
3.3.2 滑轮机构和齿轮装置
在手部的外骨骼结构设计中,滑轮机构[13](图2)和齿轮装置[24](图3)也是常见的结构。A.Chiri等设计的手部外骨骼是通过滑轮机构进行控制的,在该外骨骼中直流电机通过缆线带动外骨骼上滑轮的转动进而带动手指的活动[28]。荷兰代尔夫特理工大学研制的食指外骨骼由4个滑轮机构组成,其中3个控制食指的弯曲伸展活动,一个滑轮控制食指的内收和外展活动,每个滑轮机构都各有一个直流电机提供驱动力[44]。哈尔滨工业大学在2008年研制的手部外骨骼是基于齿轮转动而控制手指活动的外骨骼,每个指关节的活动都有一个扇形齿轮和正齿轮控制,齿轮的转动带动手指的弯曲和伸展活动,齿轮的活动由直流电机驱动,该装置能够实现每个手指2个自由度的活动[16]。Loureiro等报道的手部外骨骼系统能够控制拇指和其他4个手指的活动,其外骨骼的活动是基于齿轮和螺纹结构的转动,直流电机带动螺纹的转动进而通过齿轮驱动外骨骼的活动,该装置能够实现手指3个自由度的活动[45]。Worsnopp等设计的手外骨骼是以食指康复训练为目的,在该装置中使用了线传动的正齿轮和扇形齿轮机构,该外骨骼能够模拟食指的3个自由度的活动[13]。东京大学2005年研制的手部外骨骼也是由齿轮机构构成的,在该外骨骼系统中研究者使用了条形齿轮和扇形齿轮,通过直流电机带动2种齿轮的转动进而带动手部实现弯曲伸展的动作[46]。滑轮和齿轮装置在手外骨骼自由度的实现方面具有一定的优越性,但是其活动速度减慢且增大了外骨骼活动的摩擦力,对驱动电机的驱动力要求较高。

图2 滑轮机构手外骨骼结构[13]
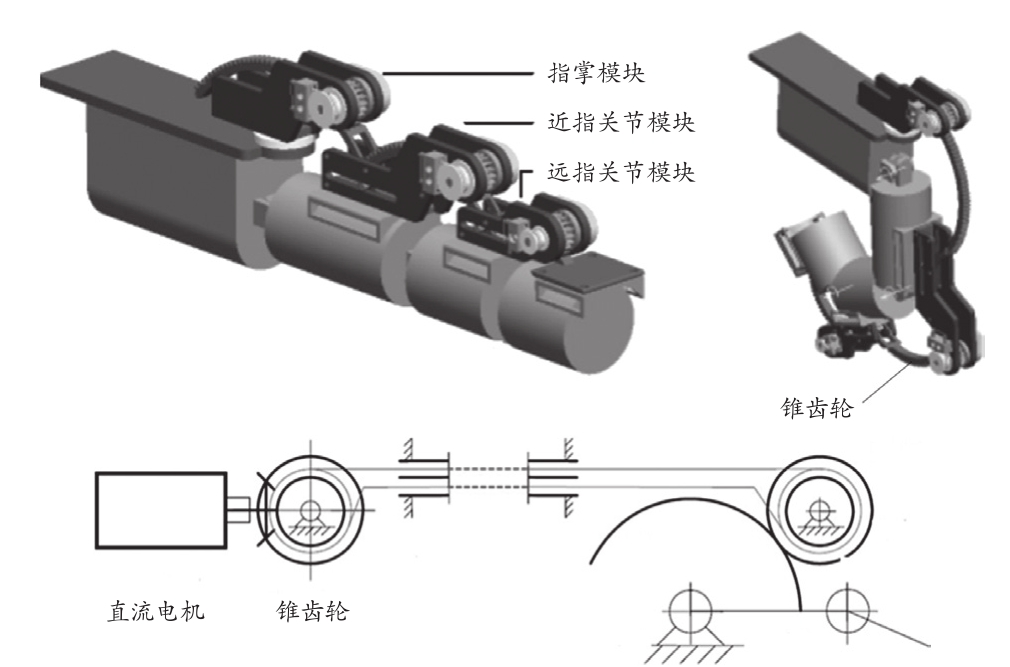
图3 齿轮机构手外骨骼结构[24]
3.3.3 驱动模式
直流电机是目前外骨骼系统驱动力的主要来源,以上介绍的外骨骼系统主要是由直流电机提供动力的,除此之外气动系统也是手部外骨骼常见的驱动动力。哈佛大学2005年研制的手部康复外骨骼的驱动力就是由两个气动杆提供的,气动杆的末端和手指端外骨骼通过控制杆相连,进而气动杆的动作带动手指的活动,该装置能够实现手指弯曲和伸展2个自由度的活动[26]。匹兹堡大学研制的食指外骨骼的驱动力也是有气动系统通过,在该装置中气动杆通过线传动装置与外骨骼相连,气动杆的活动通过缆线的活动带动手指的伸展和弯曲,该外骨骼系统能够完成食指的2个自由度的活动[23]。日本岗山大学的手部外骨骼是通过气动的橡胶肌肉来控制手部的活动的,通过控制橡胶肌肉气体的体积进而引起橡胶肌肉的伸展和弯曲进而带动手指完成6个自由度的活动[47]。除此外罗格斯大学2002年研制的手部外骨骼[25],南京大学2009年研制的食指外骨骼[17]都是有气动系统作为外骨骼活动的驱动力的。
4 存在的问题及前景展望
利用手外骨骼进行手功能的康复训练是一种非常有前景的康复训练手段,但目前手部外骨骼的应用也存在一些问题:① 手部外骨骼的重量及舒适度问题,为实现手部功能的更好恢复,需要设计自由度更多、功能更强的手部外骨骼,而这必然会造成手部外骨骼的结构复杂,体积增大,重量增加,容易造成患者训练过程中手的不适与疲劳;② 手部外骨骼与患者手部的契合度问题,不同患者的手具有各自的差异性,而外骨骼的设计是固定的,因此外骨骼与患手之间的契合程度也是研究者应该考虑的问题,契合度不好的外骨骼也会影响康复训练的效果,在该方面意大利的Marco等已进行初步的探索[27];③ 对于外骨骼康复训练有效性的问题。例如如何控制手外骨骼持续使用的时间、使用的模式等,才能达到最好的康复效果。目前手功能评价标准主要是通过一系列的标准测试问卷来完成,外骨骼训练模式对手部功能恢复的有效性,能否从肌电脑电等生物电信号、手部伸展弯曲的活动程度及力学强度等进行实时有效的评价,有待于进一步研究。相信随着技术的进步及研究的深入,手部外骨骼的功能将越来越完善,手部外骨骼作为一种手部康复辅具必将受到人们的重视。
[参考文献]
[1] E Taub,NE Miller,TA Novack,et al.Technique toimprove chronic motor deficit after stroke[J].Arch Phys Med Rehabil,1993, 74(4):347-354.
[2] DIEM.State-of-the-Art of Hand Exoskeleton Systems(2011). Università diBologna.
[3] Tsoupikova D,Stoykov NS,Corrigan M,et al.Virtual immersion for post-stroke hand rehabilitation therapy[J].Ann Biomed Eng,2015,43(2):467-477.
[4] Schmidt,Hans-Martin;Lanz,Ulrich(2003).Surgical Anatomy of the Hand.Thieme.ISBN 1-58890-007-X.
[5] J.RANDALL FLANAGAN,ROLAND S.JOHANSSON.Hand Movements.
[6] Buchholz B,Armstrong TJ.A kinematic model of the human hand to evaluate its prehensile capabilities[J].J Biomech,1992, 25(2):149-162.
[7] P Heo,GM Gu,SJ Lee,et al.Current hand exoskeleton technologies forrehabilitation and assistiveengineering.international journal of precision engineering and manufacturing[J].Int J Pre Eng Manu,2012,13(5):807-824.
[8] N Benjuya,SB Kenney.Myoelectric hand orthosis[J].J Prosthet Orthot,1990,2(2):149-154.
[9] A Boos,Q Qiu,GG Fluet,et al.Haptically facilitated bimanual training combined with augmentedvisual feedback in moderate to severe hemiplegia[J].Conf Proc IEEE Eng Med Biol Soc, 2011:3111-3114.
[10] T Kitada,Y Kunii,H Hashimoto.20 DOF five fingered glove type haptic interface -sensor glove II[J].Journal of Robotics and Mechatronics,1997,9(3):171-176.
[11] WHO,The Atlas of Heart Disease and Stroke.http://www.who. int/cardiovascular_diseases/resources/atlas/en/.
[12] Dobkin BH.Behavioral,temporal,and spatial targets for cellular transplants as adjuncts to rehabilitation for stroke [J].Stroke.2007,38(2 Suppl):832-839.
[13] TT Worsnopp,MA Peshkin,JE Colgate,et al.An actuated finger exoskeleton for hand rehabilitation following stroke[J].IEEE Int Conf Rehabil Robot,2007:896-901.
[14] Kwakkel G,Kollen BJ,van der Grond J,et al.Probability of regaining dexterity in the flaccid upper limb:impact of severity of paresis and time since onset in acute stroke[J].Stroke,2003,34(9):2181-2186.
[15] Lieber RL,Runesson E,Einarsson F,et al.Inferior mechanical properties of spastic muscle bundles due to hypertrophic but compromised extracellular matrix material[J].Muscle Nerve,2003,28(4):464-471.
[16] Y Fu,P Wang,S Wang.Development of a Multi-DOF Exoskeleton Based Machine for Injured Fingers[J].IEEE/ RSJ International Conference on Intelligent Robots and Systems,2008:1946-1951.
[17] Z Sun,X Miao,X Li.Design of a bidirectional force feedback dataglove based onpneumatic artificial muscles[J].International Conference on Mechatronics & Automation,2009:1767-1771.
[18] BL Shields,JA Main,SW Peterson,et al.Ananthropomorphic hand exoskeleton to prevent astronaut hand fatigue during extravehicular activities[J].IEEE Trans Syst Man Cybern A Syst Hum,1997,27(5):668-673.
[19] J Wang,J Li,Y Zhang,et al.Design of an Exoskeleton for Index FingerRehabilitation[J].Proc IEEE Eng Med Biol Soc,2009:5957-5960.
[20] S Ito,H Kawasaki,Y Ishigure,et al.A design of fine motion assist equipment for disabled hand in robotic rehabilitation system[J].Journal of the FranklinInstitute,2009,348(1):79-89.
[21] 王鹏,付宜利,王树国,等.创伤手指康复外骨骼手系统的设计[J].光学精密工程,2010,18(1):108-117.
[22] van Delden AL,Beek PJ,Roerdink M,et al.Unilateral and Bilateral Upper-Limb Training Interventions After Stroke have Similar Effects on Bimanual Coupling Strength[J].Neurorehabil Neural Repair.2015,29(3):255-267.
[23] M Dicicco,L Lucas,Y Matsuoka.Comparison of Control Strategies for an EMGControlled Orthotic Exoskeleton for the Hand[J].IEEE Int Conf Rob &Auto,2004,2(2):1622-1627.
[24] L Turki,P Coiffet,L Turki,et al.Dextrous Telemanipulation with Force Feedback in Virtual Reality[J].Acm-Sigchi Vrst’95,1995:193-202.
[25] M Bouzit,G Burdea,G Popescu,et al.The Rutgers Master IINew Design Force-Feedback Glove[J].IEEE ASME Trans Mechatron,2002,7(2):256-263.
[26] CD Takahashi,L Der-Yeghiaian,VH Le,et al.A robotic device for hand motor therapy after stroke[J].IEEE Int Conf Rehabil Robot,2005:17-20.
[27] Cempini M,Marzegan A,Rabuffetti M,et al.Analysis of relative displacement between theHX wearable robotic exoskeleton and theuser’s hand[J].J Neuroeng Rehabil,2014,(11):147.
[28] A Chiri,F Giovacchini,N Vitiello,et al.HANDEXOS:towards an exoskeleton device for the rehabilitation of the hand[J].IEEE/RSJ Int Conf on Intel Rob & Sys,2009:1106-1111.
[29] A Wege,G Hommel.Development and Control of a Hand Exoskeleton for Rehabilitation of Hand Injuries[J].IEEE/ RSJ International Conference on Intelligent Robots & System,2005,3046-3051.
[30] M Fontana,A Dettori,F Salsedo,et al.Mechanical design of a novel Hand Exoskeleton for accurate force displaying[J].IEEE International Conference on Robotics & Automation, 2009:2599-2604.
[31] H Kawasaki,S Ito,Y Ishigure,et al.Development of a hand motion assist robot for rehabilitation therapy by patient self-motion control[J].IEEE International Conference on Rehabilitation Robotics,2007:34-240.
[32] K Tadano,M Akai,K Kadota,et al.Development of grip amplified glove using bi-articular mechanism with pneumatic artificial rubber muscle[J].IEEE International Conference on Robotics & Automation,2010,58(8):2363-2368.
[33] J Li,R Zheng,Yuru Zhang.iHandRehab:an Interactive Hand Exoskeleton for Active and Passive Rehabilitation[J].IEEE International Conference on Rehabilitation Robotics,2011, (2011):1-6.
[34] Yamaura H,Matsushita K,Kato R,et al.Development of hand rehabilitation system for paralysis patient-universal design using wire-driven mechanism[J].IEEE International Conference on Robotics & Biomimetics,1990,2(2):149-154.
[35] Yamaura H,Matsushita K,Kato R,et al.Development of hand rehabilitation system using wire-driven link mechanism for paralysis patients[J].Conf Proc IEEE Eng Med Biol Soc,2009: 7122-7125.
[36] NgeoJ,Tamei T,Shibata T,et al.Control of an Optimal Finger Exoskeleton based on Continuous JointAngle Estimation fromEMG signals[J].Conf Proc IEEE Eng Med Biol Soc,2013:338-341.
[37] SoekadarSR,WitkowskiM,Vitiello N,et al.An EEG/EOG-based hybrid brain-neuralcomputerinteraction (BNCI) system to control an exoskeletonfor the paralyzed hand.Biomed[J].Biomed Tech (Berl),2015,60(3):199-205.
[38] SVAdamovich,AS Merians,R Boian,et al.A Virtual Reality Based Exercise System for Hand Rehabilitation.Post-Stroke[J].Conf Proc IEEE Eng Med Biol Soc,2004,7:4936-4939.
[39] Fleischer C,Wege A,KonstantinK,et al.Application of EMG Signals for Controlling Exoskeleton Robots[J].Biomed Tech(Berl),2006,51:314–319.
[40] M Mulas,M Folgheraiter,GGini.An EMG-controlled exoskeleton for hand rehabilitation[J].Rehabilitation Robotics, 2005:371-374.
[41] A Frisoli,F Simoncini,M Bergamasco,et al.Kinematic Design of a two contact points haptic interface for the thumb and index fingers of the hand[J].J Mech Des N Y,2007,129(5):520-529.
[42] LI Jiting,S Wang,J Wang,et al.Development of a hand exoskeleton system for index finger rehabilitation[J].Chinese Journal of Mechanical Engineering,2012,25(2):223-233.
[43] K Nasi?owski,J Awrejcewicz,D Lewandowski.Kinematic analysis of the finger exoskeleton using MATLAB/Simulink[J].Acta of Bioengineering & Biomechanics,2014,16(3):129-134.
[44] MJ Lelieveld,T Maeno,T Tomiyama.Design and development of two concepts for a 4 dof portable haptic interface with active and passive multi-point force feedback for the index finger[J].Asme International Design Engineering Technical Conferences & Computers & Information in Engineering,2006:547-556.
[45] RCV Loureiro,WS Harwin.Reach & grasp therapy:design and control of a 9- dof robotic neuro-rehabilitation system[J].IEEE Int Conf Rehabil Robot,2007:757-763.
[46] S Nakagawara,H Kajimoto,N Kawakami,et al.An encountertype multi-fingered master hand using circuitous joints[J].Proce IEEE Int Confon Rob and Aut,2005:2667-2672.
[47] T Noritsugu,H Yamamoto,D Sasaki,et al.Wearable power assist device for hand grasping using pneumatic artificial rubber muscle[J].Rob Hum Int Com,2004,1:420-425.
Research on the Development of Hand Exoskeleton as a Rehabilitation Technology
CHEN Xue-bin1, GAO Hai-peng1, LIU Wen-yong2,GAO Min1, AN Zheng1
1.Department of Medical Engineering, China-Japan Friendship Hospital, Beijing 100029, China; 2.College of Biological and Medical Engineering, Beihang University, Beijing 100191, China
Abstract:Hand function deficiencies have strong impact on people’s activities of daily living. Stroke is one of the most common causes of hand function deficiencies. At present the hand rehabilitation after stroke mainly depends on manual training from the medical staff. Hand exoskeleton, a technical aid that can assist the rehabilitation of hands through patients autonomous training, has caught more attention from researchers. In this review, we summarized the development of hand-exoskeleton at home and broad, and analyzed the common structures, driving patterns and control modes of hand exoskeleton, which may provide useful technical support for follow-up researches on the development of hand exoskeleton as a rehabilitation technology.
[中图分类号]R197.39;TP242.6
[文献标志码]A
doi:10.3969/j.issn.1674-1633.2016.02.022
[文章编号]1674-1633(2016)02-0086-06
收稿日期:2015-08-17
修回日期:2015-11-30
Abstract:: hand exoskeleton; rehabilitation technical aid; control modes; driving patterns; degree of freedom