基于模糊PI速度调制的离心血泵搏动性研究
唐敏,杨明
上海交通大学 电子信息与电气工程学院仪器科学与工程系,上海 200240
[摘 要]提高离心血泵的搏动性能减少血液周身循环阻力,有助于增加血液循环量。现有离心血泵主要工作在恒转速模式,辅助出的主动脉压搏动性较小,而脉压差过低对血管的结构和功能会产生不良的影响。所以针对离心泵搏动性较小的问题,本文建立循环系统和人工心脏血泵的耦合模型,利用模糊PI控制器,通过调制血泵的转速来提高离心泵辅助后主动脉压的搏动性。利用搭建的体外模拟循环实验平台,将血泵和基于STM32的控制器接入模拟循环装置中,辅助后平均主动脉压稳定在100 mmHg,脉压差稳定在20 mmHg。
[关键词]心室辅助;循环系统与血泵耦合模型;主动脉压;搏动性
0 前言
据统计,全球心衰患者以每年200万的速度递增,对心衰病人最有效的治疗手段是心脏移植,但可供移植的器官供应不足[1-2],因此心室辅助装置成为治疗的有效手段之一。离心泵因为体积小重量轻,易于植入[3],成为心室辅助装置中的研究热点。现有离心泵主要工作在恒转速模式,此模式下血泵辅助出的血压恒定,和心衰心脏并联后平均主动脉压可以达到正常值,满足对器官的灌注需求,但产生的主动脉压的搏动性很低,导致血管形态学改变和出血,而且会降低血管顺应性增大血管阻抗[4]。
为提高叶轮血泵的搏动性,钱坤喜等[5]通过周期性地改变叶轮转速来产生搏动流,但是因为没有设计闭环控制器,所以系统容易受到干扰因素的影响;基于NI实时控制器的模糊控制器算法,黄峰等[6]利用闭环控制调制叶轮转速,提高了主动脉脉压差。但简单的模糊控制器稳态误差较大,稳定精度不够,并且NI控制器体积较大不利于携带。为了得到较好的动态响应和较高的稳定精度[7],基于STM32微控制器,本文将PI控制策略引入模糊控制中,构成 Fuzzy-PI 复合控制器,通过周期性地调制血泵转速,将平均主动脉压和脉压差都稳定在设定值。
1 循环系统与人工心脏泵耦合模型
1.1 离心泵建模
参考Choi等[8]的文献,可以得到血泵的状态方程如下:
其中, 表示血泵的流量,![]() 表示流量的变化率,H表示血泵进出口的压力差, 表示电机转速。实验常数β0,β1、β2可通过最小二乘法确定。
表示流量的变化率,H表示血泵进出口的压力差, 表示电机转速。实验常数β0,β1、β2可通过最小二乘法确定。
1.2 循环系统与离心泵的耦合模型
为研究循环系统与离心泵的耦合,心血管循环模型将主要考虑左心室的功能,而省略肺循环、右心房和右心室。简化后的心血管循环系统与离心泵的耦合模型如图1所示,血泵并联在左心室和主动脉之间。CR和Ct表示左心房和左心室的顺应性,血管壁是有弹性的,顺应性用来表征血管容积随血压的变化而改变的程度;二极管DM和DA分别代表二尖瓣和主动脉瓣;RM和RA分别为二尖瓣流阻和主动脉瓣流阻;LC表示血液的惯性,RC和CS分别表示外周阻力和动脉顺应性,左心室顺应性Ct是一个实变参数,可以看成E(t)的倒数,对离心血泵的建模:
其中归一化弹性En(tn)的表达式为:

其中Emax和Emin分别代表弹性函数的最大和最小值;tn=t/Tmax,Tmax=0.2+0.15tc,tc是心动周期。
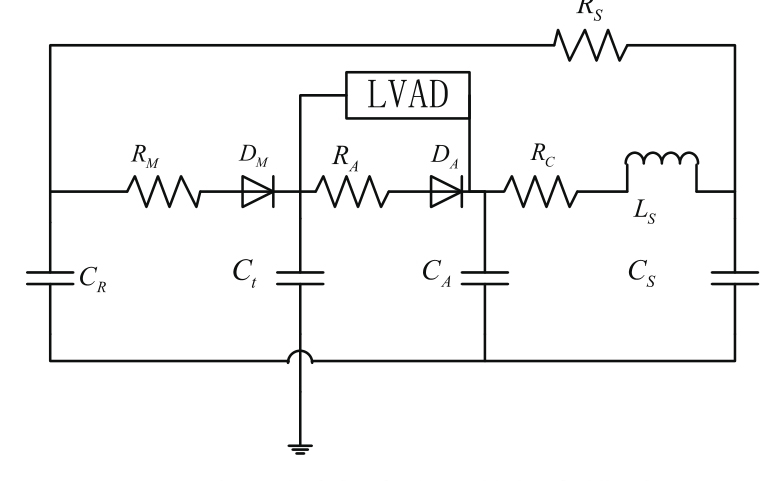
图1 循环系统与离心泵的耦合模型
注:LVAD:左心室辅助装置。
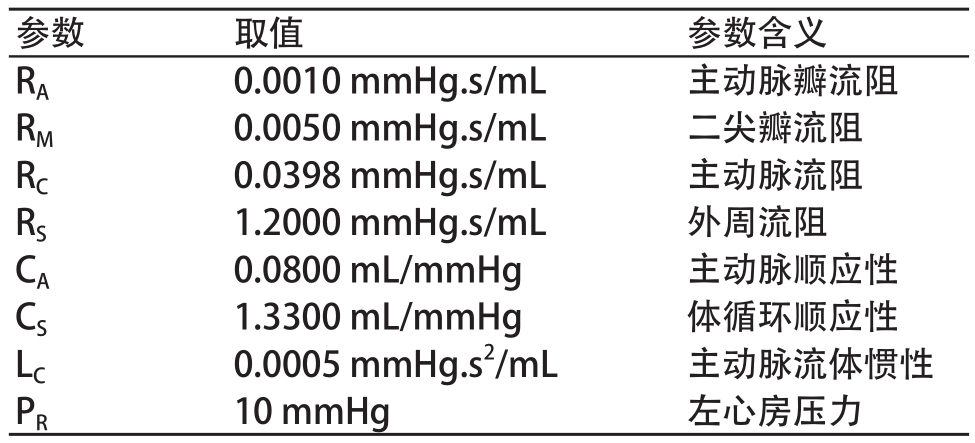
模型中的参数常量定义和取值见表1[9]。
表1 模型中的参数值
利用基尔霍夫定理,耦合后的电网络模型可以用如下的5阶线性状态方程组表示:
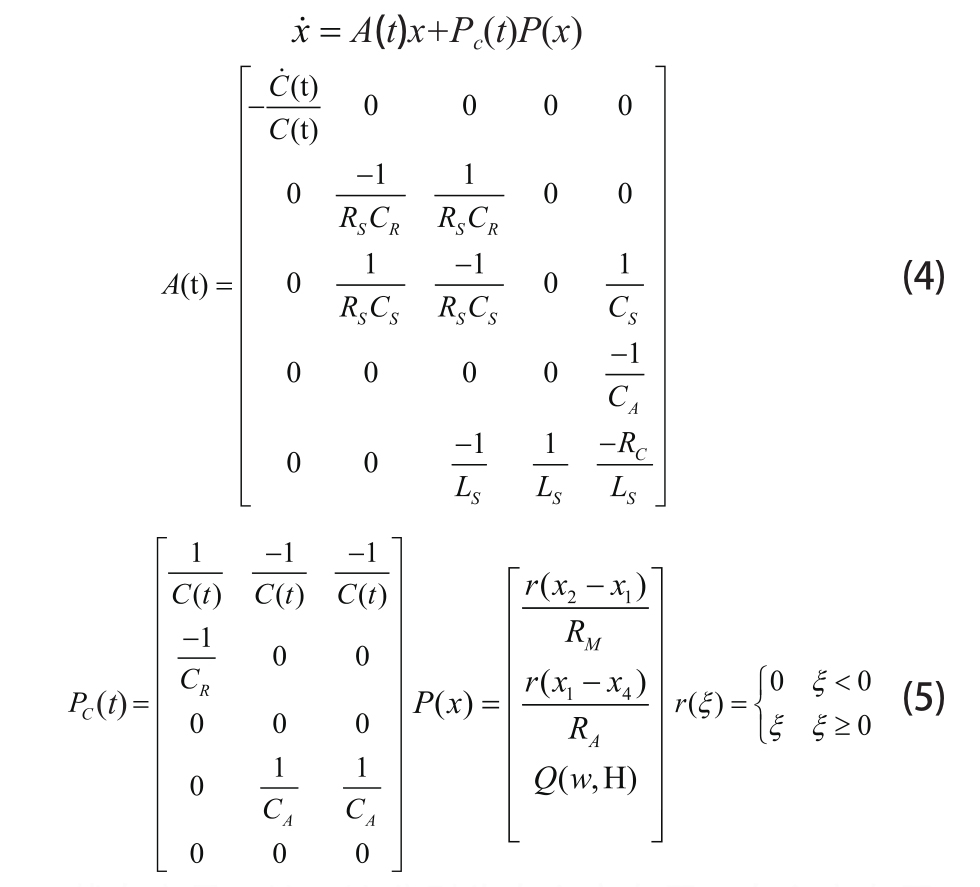
状态变量x1(t)-x5(t)分别为左心室血压、左心房血压、动脉血压、主动脉压、动脉血流速率。其中,Q(w,H)为血泵的流量,由血泵的转速和血泵两端的压差决定。
2 心衰下恒转速仿真
为了仿真心衰下循环系统的血液动力学状态,根据Tsuruta等[10]的文献,在Ⅲ级心衰的情景下,取值为0.630 mmHg/mL模拟心室收缩功能的损失,将Emin从正常值0.06 mmHg/mL增加到0.1 mmHg/mL来模拟心肌肥厚。设置心动周期为1 s,即心率为60 bpm。仿真软件采用Matlab2014a的工具箱simulink。仿真结果通过示波器模块输出显示。左心循环simulink的模型框架如图2所示。
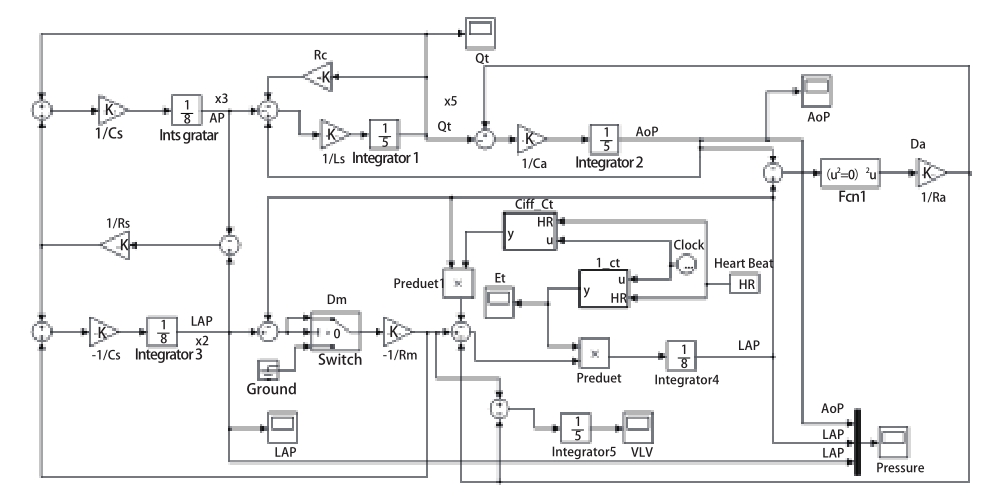
图2 心血管集中参数模型的simulink框架
未接入血泵模型时心衰的主动脉压如图3所示,仿真时间为10 s,主动脉收缩压和动脉舒张压都很低,压力波形和正常心衰的主动脉压吻合,证明心血管系统建模的正确性。但是平均主动脉压为明显低于正常人的值,心衰心脏需要接入左心室辅助装置。
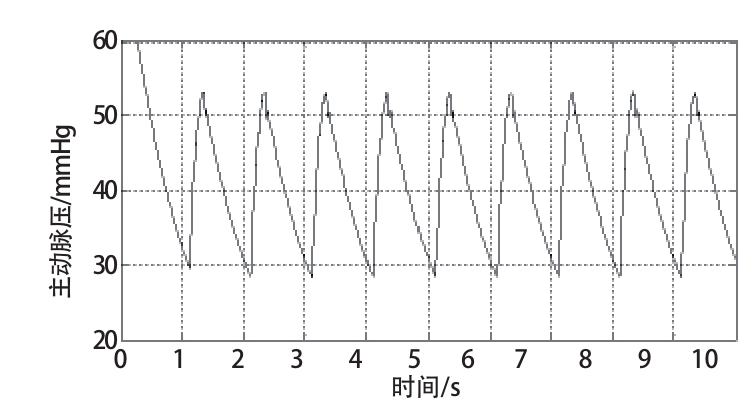
图3 耦合模型主动脉压
根据图1所示,将血泵并联接入左心室和主动脉两端后,设置泵转速从750 rad/s到1150 rad/s逐渐升高。从图4可以看出,平均主动脉压和主动脉流逐渐增大,但是脉压差却随着转速的升高逐渐减小,当转速达到1110 rad/s时,脉压差<10 mmHg。这会引起主动脉瓣狭窄、休克以及由于肥胖、血液粘稠度增高或合并糖尿病、高脂血症等常见的疾病[11]。
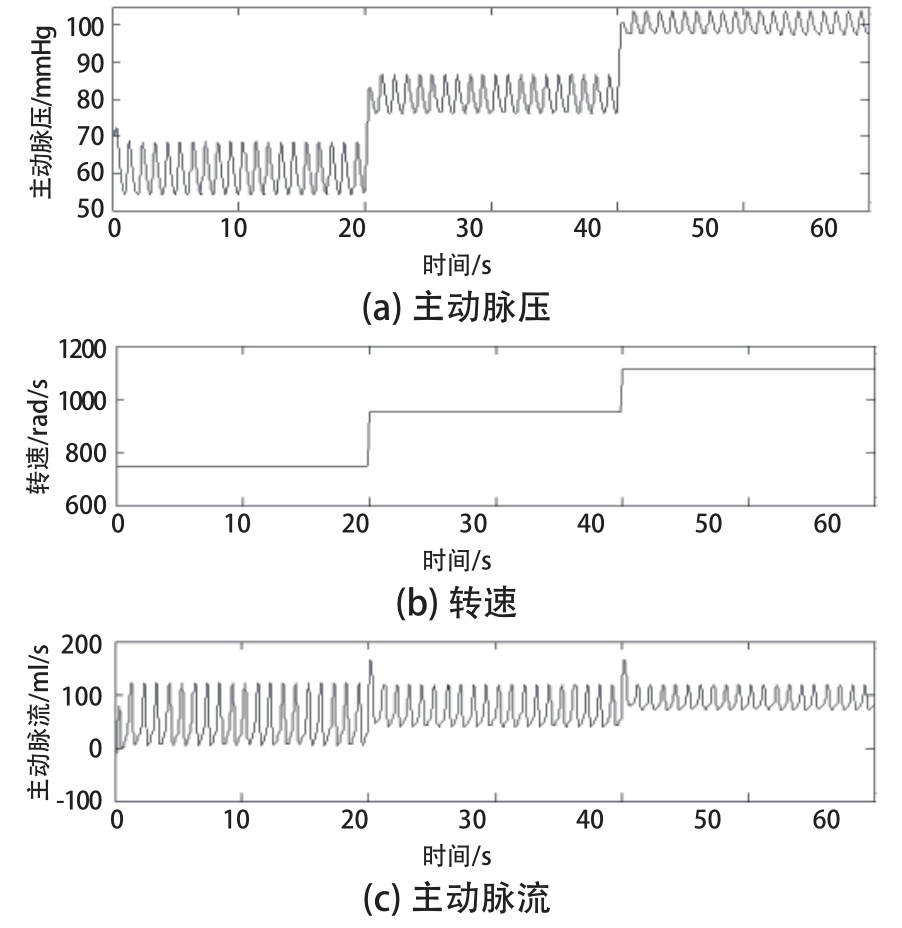
图4 主动脉压和主动脉流响应曲线
3 模糊PI控制器的设计
为了避免脉压差过小的问题,本文设计了如图5所示的闭环控制器,将实时的平均主动脉压和脉压差与设定值的差值分别输入给模糊控制器1和模糊控制器2,控制器的输出分别为电机的平均转速wm和调制转速wP。当系统出现干扰或者系统的参数变化时,控制器会调节wm和wP,使得平均主动脉压和脉压差都稳定在设定值上。
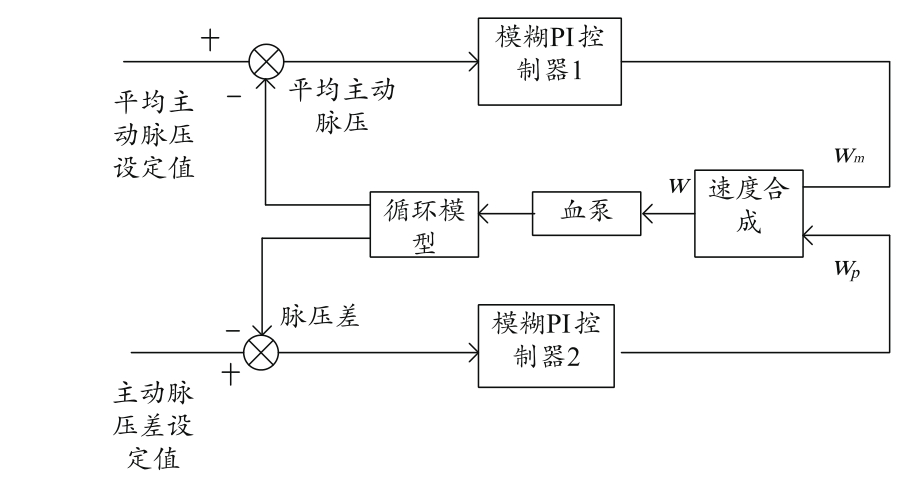
图5 双闭环控制原理图
电机的转速是w:
T为心动周期,t为一个心动周期内的时间,设置血泵在前半心动周期以高速wm+wp旋转,在后半心动周期血泵以低速wm+wp旋转。整个心动周期的平均转速为大小wm,wm决定了平均主动脉压的大小。转速的波动wp的大小则决定了脉压差的大小,平均主动脉压的目标值设定为100 mmHg,脉压差的目标值设定为20 mmHg。
本文采用如图6所示的模糊PI控制器,比例和积分得系数可以根据模糊推理规则灵活调整。转速偏差e、转速偏差变化率de/dt、比例修正值 和积分修正值 的模糊集为{NB,NM,NS,ZO,PS,PM,PB}。子集中元素分别代表负大,负中,负小,零,正小,正中,正大。因为三角形隶属函数仅与它的直线斜率有关,运算较简单,所占内存空间也小,模糊控制器的隶属函数采用如图7所示的三角形隶属函数。
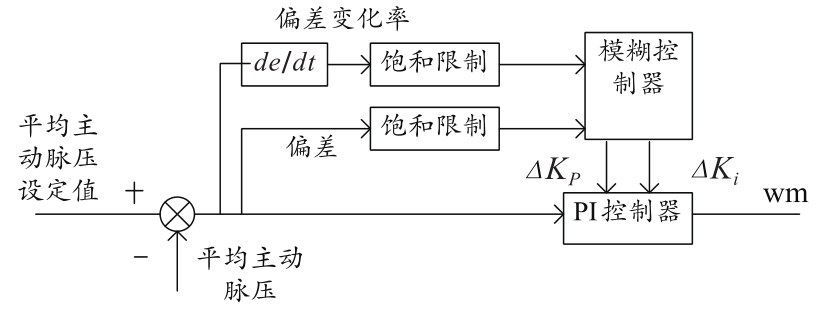
图6 平均主动脉压的模糊PI控制器
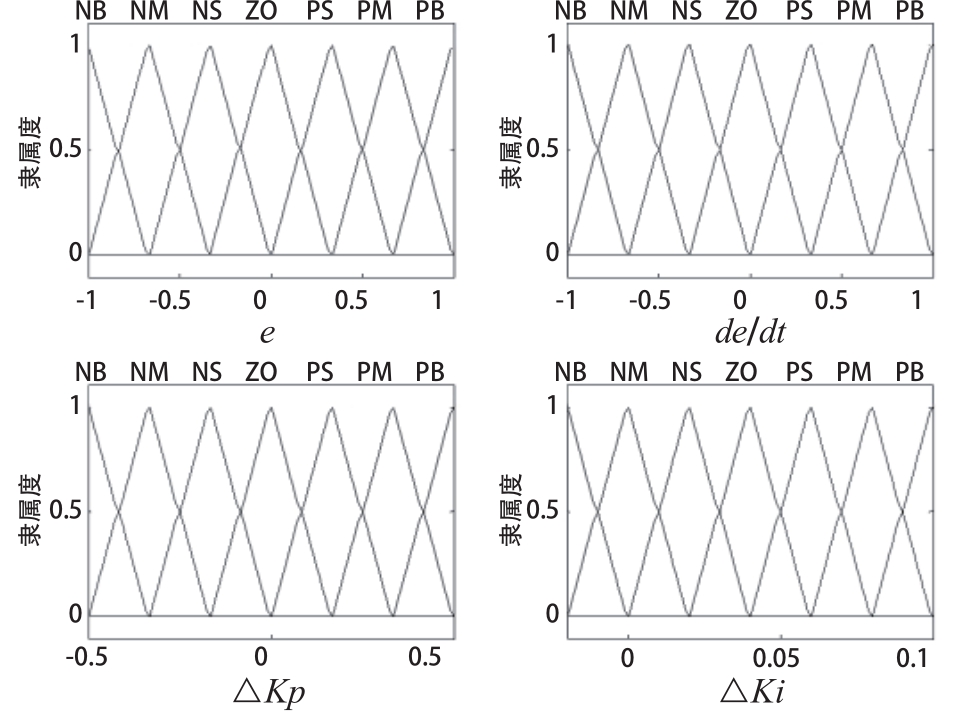
图7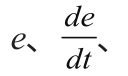 Kp、Ki的隶属函数
Kp、Ki的隶属函数
建立模糊控制规则表,在平均主动脉压偏差较大时,增大Kp,以提高系统的响应速度;在转速偏差较小时,增大ΔKi,以提高系统的稳态特性,ΔKp和ΔKi的控制规则如表2和3所示。根据转速偏差e和转速偏差变化率![]() 就可以区分出系统处在哪个阶段,结合实际控制经验,采用相对应的Kp和ΔKi值,就能大大改善系统的动态和稳态性能。
就可以区分出系统处在哪个阶段,结合实际控制经验,采用相对应的Kp和ΔKi值,就能大大改善系统的动态和稳态性能。
表2ΔKp模糊控制规则表
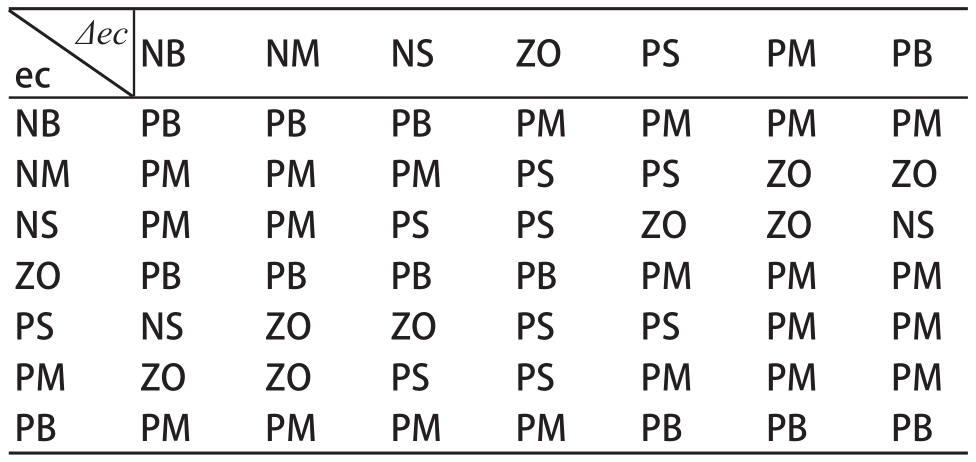
表3ΔKi模糊控制规则表

脉压差的模糊PI控制器和平均主动脉压的控制器设计方法一样,都是通过试凑,调节到最佳状态。仿真总时长为200 s,仿真稳定后,舒张压为90 mmHg,收缩压为110 mmHg,平均主动脉压达到了为100 mmHg,脉压差为20 mmHg,主动脉压具有很好的搏动性。在120 s时将外周流阻Rs从1 mmHg.s/mL增大到1.5 mmHg.s/mL,外周流阻的增大使主动脉压增大,从图8的120 s可以明显看出波动,随后在控制器作用下平均主动脉压又稳定在了设定值100 mmHg,脉压差仍为20 mmHg。证明控制器具有很好的鲁棒性。
图8 模糊PI控制器下的的主动脉压
4 实验
模拟循环系统分为模拟左心室、模拟体循环、检测传感器。心衰患者的自然心脏大部分还保留一定的射血能力,采用隔膜式气动泵模拟自然心脏左心室结构,真空泵和空气压缩机间隙工作,将空气压入和抽出气室,模拟自然心脏的收缩和舒张。体循环模拟装置包括动脉顺应性腔、静脉腔、主动脉以及外周流阻。检测传感系统测量模拟系统的主动脉压。压力测量采用NS-F型压力传感器,量程为0~30 kPa。模拟循环装置可调节动脉阻抗、动脉顺应性、外周阻抗等参数,以仿真人体生理参数的变化。实验平台如图9所示。
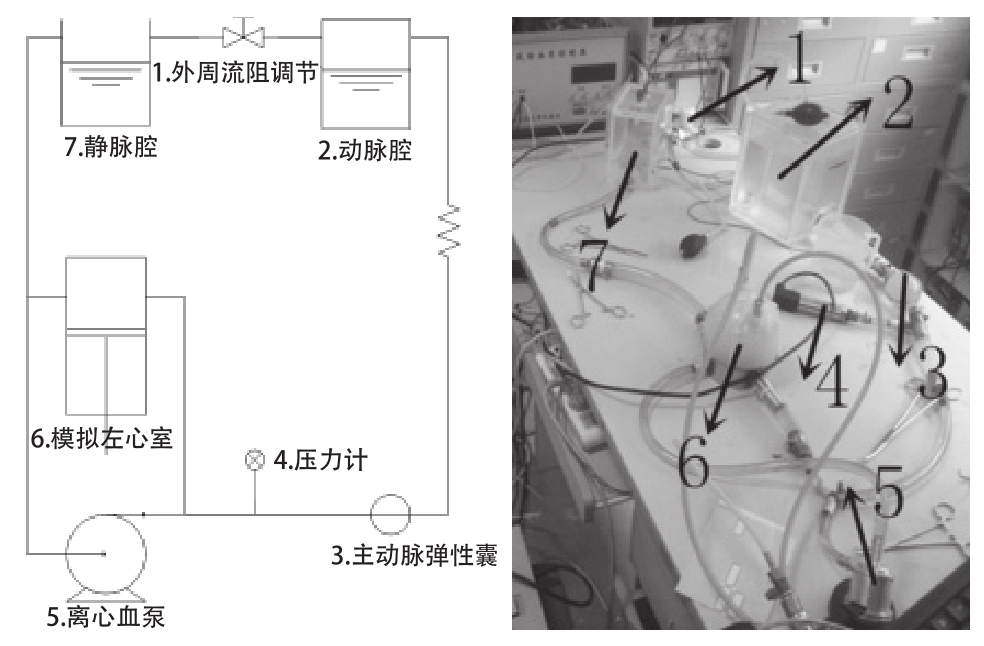
图9 实验平台
实验采用的离心血泵由直流无刷电机驱动,改变电机转速可调节血泵辅助后的主动脉压。如图10所示,本文采用直流电机脉宽(PWM)变换器调节转速,STM32控制器对压力传感器信号进行AD采样和数字滤波,模糊PI控制器输出PWM脉冲占空比可调的驱动信号,输入给直流电机驱动芯片,PWM的占空比越大,驱动电机的电压就越大,从而调整电机的转速,实现对血泵转速的调制。
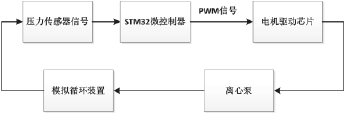
图10 STM32控制器
将离心血泵接入模拟循环系统,首先控制电机工作在恒转速模式,当血泵和气动血泵并联后辅助出的主动脉压如图11所示,当平均主动脉压为100 mmHg时脉压差只有10 mmHg,脉压差过低。切换电机工作模式至搏动模式,通过模糊PI控制器控制血泵转速,稳定后,如图12所示,平均主动脉压达到了100 mmHg,脉压差达到20 mmHg。
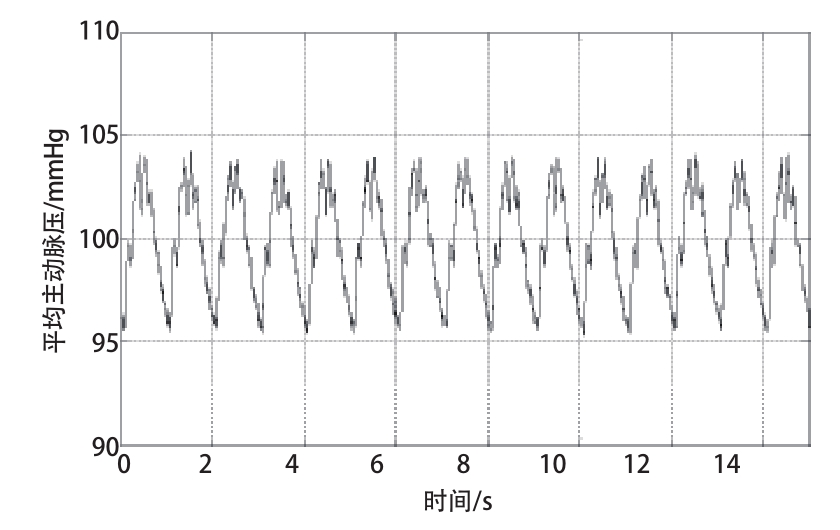
图11 恒转速下的主动脉压
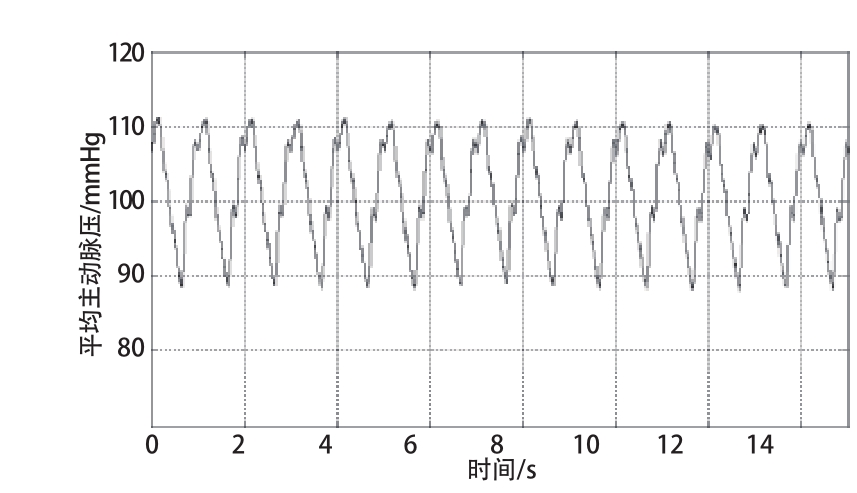
图12 搏动转速下的主动脉压
5 结论
目前恒速控制广泛使用在临床血泵的辅助治疗中,虽然平流泵可以满足生理器官的灌注需求,平均主动脉压可以达到标准值,但恒速控制产生的脉压差过小。因此血泵在满足外周器官灌注需求的同时还要保证主动脉压的搏动性,这种搏动性血流对维持良好的生理功能以及心衰心脏的恢复至关重要。本文为了提高离心血泵的搏动性,建立了心血管离心血泵的耦合模型,并进行了计算机仿真。然后搭建了模拟循环的实验平台,在模糊PI控制器作用下,通过调制每个心动周期内血泵的转速辅助出具有搏动性的主动脉压,达到了左心辅助的要求,仿真和实验结果都表明了设计的模糊PI控制器的可行性。
[参考文献]
[1] Schocken DD,Arrieta MI,Leaverton PE,et al.Prevalence and mortality rate of congestive heart failure in the United States[J].J Am Coll Cardiol,1992,20(2):301-306.
[2] Kannel WB.Epidemiological aspects of heart failure[J].Cardiol Clin,1989,7(1):1-9.
[3] Alomari AHH,Savkin AV,Stevens M,et al.Developments in control systems for rotary left ventricular assist devices for heart failure patients: a review[J].Physiol Meas,2013,34(1):R1-R27.
[4] Travis AR,Giridharan GA,Pantalos GM,et al.Vascular pulsatility in patients with a pulsatile-or continuous-flow ventricular assist device[J].J Thorac Cardiov Sur,2007,133(2):517-524.
[5] 钱坤喜,曾培,茹伟民,等.轴流泵及离心泵产生低扰动搏动流的方法[J].机械工程学报,2001,37(3):59-61.
[6] Huang F,Ruan X,Fu X.Pulse-pressure-enhancing controller for better physiologic perfusion of rotary blood pumps based on speed modulation[J].ASAIO J,2014,60(3):269-279.
[7] 郭国法,张开生.变参数自调整的FUZZY-PI控制器设计[J].陕西科技大学学报:自然科学版,2008,26(3):88-90.
[8] Choi S,Boston JR,Thomas D,et al.Modeling and identification of an axial flow blood pump[C].Proceedings of the American Control Conference,1997,(6):3714-3715.
[9] Simaan M,Ferreira A,Chen S,et al.A Dynamical State Space Representation and Performance Analysis of a Feedback-Controlled Rotary Left Ventricular Assist Device[J].IEEE T Contr Syst T,2009,17(1):15-28.
[10] Tsuruta H,Sato T,Shirataka M,et al.Mathematical model of cardiovascular mechanics for diagnostic analysis and treatment of heart failure: Part 1 model description and theoretical analysis[J].Med Biol Eng Comput,1994,32(1):3-11.
[11] 常怡勇.脉压差里看“问题”[J].家庭医药.快乐养生,2013,(9): 36-37.
Research on Pulsatility of Blood Pumps Based on the Fuzzy PI Algorithm Speed Modulation
TANG Min, YANG Ming
Department of Instrument Science and Engineering, School of Electronic Information and Electrical Engineering, Shanghai Jiaotong University, Shanghai 200240, China
Abstract:The increase in pulsatility of centrifugal pumps can decrease the resistance of blood circulation. Most centrifugal pumps in use now work with constant pressure, which provides nonpulsatile perfusion. In non-pulsatile pumps, the pulsatility of the aortic pressure decreases with the increase of rational speed. The low pulsatile value of aortic pressure has a negative effect on the structures and functions of blood vessels. This paper builds the cardiovascular-pump model and simulates the model using MATLAB. The fuzzy PI Controller, which uses the volatility of the speed of pumps to enhance the pulsatility of the aortic pressure, was designed. Then we set up the experiment platform and linked the blood pump and the controller based on STM32 to the mock cardiovascular system. The result of the experiment indicates that the pulse pressure is 20 mmHg and the mean pressure is 100 mmHg, which can meet the hemodynamic requirements of LVAD.
Key words:ventricular assist device; cardiovascular-pump system coupled model; aortic pressure; pulsation
[中图分类号]TP273
[文献标志码]A
doi:10.3969/j.issn.1674-1633.2016.01.005
[文章编号]1674-1633(2016)01-0021-05
收稿日期:2015-10-17
修回日期:2015-12-21
基金项目:国家自然科学基金(No.81571831);上海市医疗器械科技支撑项目(No.14441900500);上海交通大学“医工(理)交叉研究基金”项目(No.YG2011ZD03)。
通讯作者:杨明,教授,博士生导师。