达芬奇Si手术机器人系统的质量控制
余冬兰1,刘阳萍1,李宏行1,冯锦涛1,崔泳琳1,匡铭1,2
1.中山大学附属第一医院 设备科,广东 广州 510080;2.中山大学附属第一医院 肝外科,广东 广州 510080
[摘 要]目的 达芬奇Si(Da Vinci Si)手术机器人系统是目前全世界最先进的微创外科手术平台。该系统整合了三维立体高分辨率的影像技术和可转腕手术器械以及直觉同步操控技术,使复杂外科手术能以微创方式开展,因为其质量和精度关系到患者的生命安全,所以该系统的质量控制非常重要。方法 以93/42/EEC Medical Devices Directive标准及厂家标准为依据,对机器人设备的电气安全、稳定性和精确性、视频及信息通讯等方面进行质量控制。结果 通过质量控制,保障了设备正常运行和设备的精度,保证了患者的安全。结论 严格按照质量控制标准定期对机器人进行检测和保养,可以提前发现问题,防止手术过程中出现机器人操控性差,图像不清晰以及通讯信号不稳定等情况,从而保证手术成功率。
[关键词]外科手术机器人系统;质量控制;电气安全;监视器
0 前言
自20世纪90年代起,机器人辅助微创外科手术逐渐成为一个显著的发展趋势。由Intuitive Surgical公司研发的达芬奇手术机器人系统,于2000年通过美国FDA认证,是目前最先进的微创手术机器人系统。该系统融合诸多新兴学科,实现了外科手术微创化、智能化和数字化的发展[1]。截至2014年底,达芬奇手术机器人系统已在全世界装机3266台,其中,中国大陆装机29台并已经成功开展了11471例机器人手术,手术种类涵盖泌尿外科、胃肠外科、肝胆外科、妇产科、心脏外科、胸外科等。
1 达芬奇Si手术机器人系统简介
达芬奇Si手术机器人系统主要由控制台系统(医生操作台)、操作臂系统(床旁机器人)和成像系统(视频车)组成。
控制台系统是达芬奇Si手术机器人系统的控制中心,由计算机系统、手术操作监视器、三维图像观察器、操作手柄、脚踏板及其他输入输出设备组成。主刀医生坐在无菌区外的控制台中,使用双手操作主控制器,用脚控制踏板来控制三维高清内窥镜和器械,保证手术器械尖端与外科医生的双手同步运动,并可将操作幅度按比例缩小(设计比例为1.5:1、2:1、3:1),同时过滤掉手部颤动[2],将正常人手抖动或无意识移动的影响降至最低。
操作臂系统具有4个固定于可移动基座的机械臂,底座通过光纤和高可靠性航空插头与控制台相连。中心机械臂是摄像臂,负责握持摄像机系统,与传统腹腔镜助手握持相比,提供了更加稳定的图像,避免传统腹腔镜术中助手疲劳导致手部抖动出现视野不稳定的问题[3]。其余机械臂是器械臂,负责握持特制外科手术器械,配合EndoWrist仿真机械手,自由度高达7度,包括臂关节上下、前后、左右运动与机械手的左右、旋转、开合、末端关节弯曲共7种动作,并可作沿垂直轴360°和水平轴270°旋转,且每个关节活动度均>90°[4]。
成像系统内装有达芬奇Si手术机器人系统的中央处理器以及图像设备,还设置了触摸屏显示器、光源、内窥镜、高清立体摄像头及高清摄像机控制单元。摄像头包含两个高清视频摄像机,分别用于左侧和右侧光路。高清图像系统通过数字变焦提供宽屏幕(16:9)和放大视图,以实现可控的高质量三维图像。
2 达芬奇Si手术机器人系统质量控制
由于达芬奇手术机器人系统是高风险三类医疗设备,其可靠性和安全性尤为重要,而且由于国内大部分医院通常只有1台同类设备无备机可用,一旦出现不可恢复的设备故障,势必会影响手术计划的实施,导致术中临时转化手术模式至普通内窥镜手术或开放性手术,或在患者麻醉的情况下更换问题配件造成手术时间延长[5-6],因此必须对其使用过程中的质量进行必要的控制,最大限度地保障设备的可靠性和安全性,降低设备故障对临床使用的影响。在中国大陆地区,目前还没有针对这一设备建立完善的质量控制体系[7]。本文通过对我院引进的达芬奇Si手术机器人系统(以下简称手术机器人)的质控实践工作,探讨对该系统的质量控制方式和方法,主要包括:电气安全分析、钢丝松紧度测试、配重平衡检测、摩擦测试、手柄检测、光纤检测、视频系统检测,共7项。
2.1 电气安全分析
目的:确保机器接地良好并且不漏电,操作者和患者不因为手术机器人设备被电击。
测试内容:接地阻抗、漏电流。
测试仪器:RIGEL 288。
测试对象:医生操作台、视频车、床旁机器人以及床旁机器人的4条机械臂。
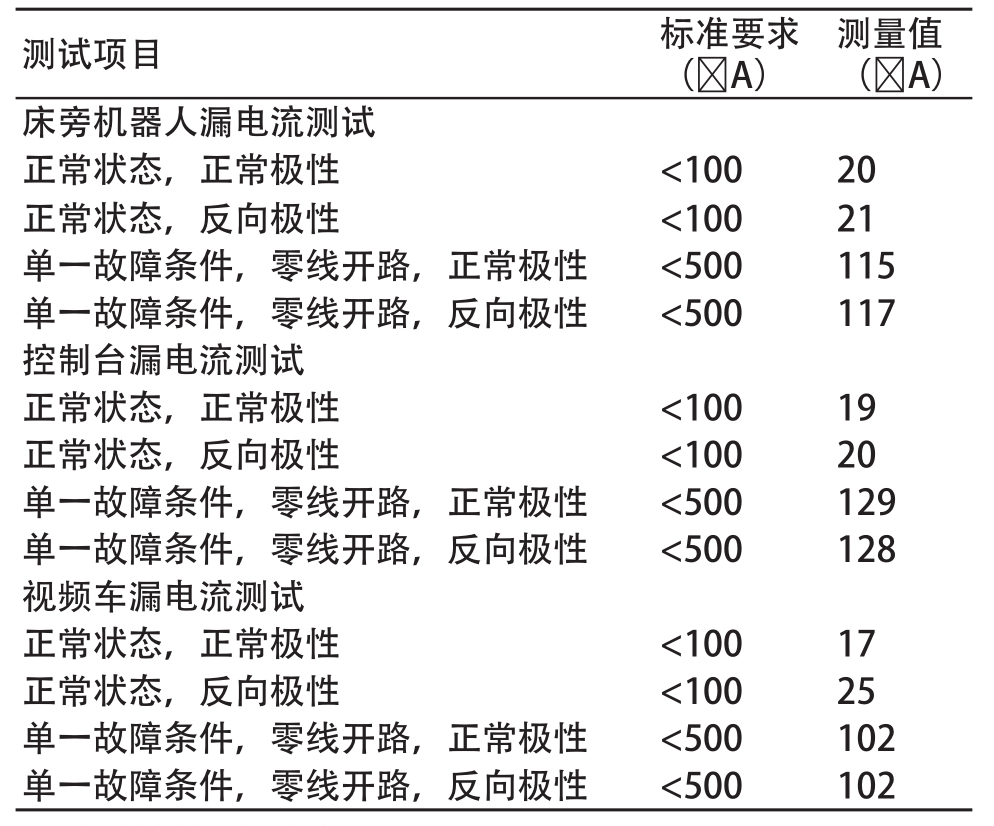
步骤:测试前先关机,将机器的控制台、视频车、床旁机器人的连接光纤和电源线全部断开。将电气安全分析仪的接线夹子夹紧测试点,电流源(墙电)接入电气安全分析仪,将被测机器人的各部分电源插头单独接入电气安全分析仪,在电气安全分析仪上按测试键分别测试各测试对象的接地阻抗及漏电电流。测量值参考电气安全标准为IEC60601(GB9706),测量结果符合规定要求。测试结果,见表1~2。
表1 接地阻抗测试结果
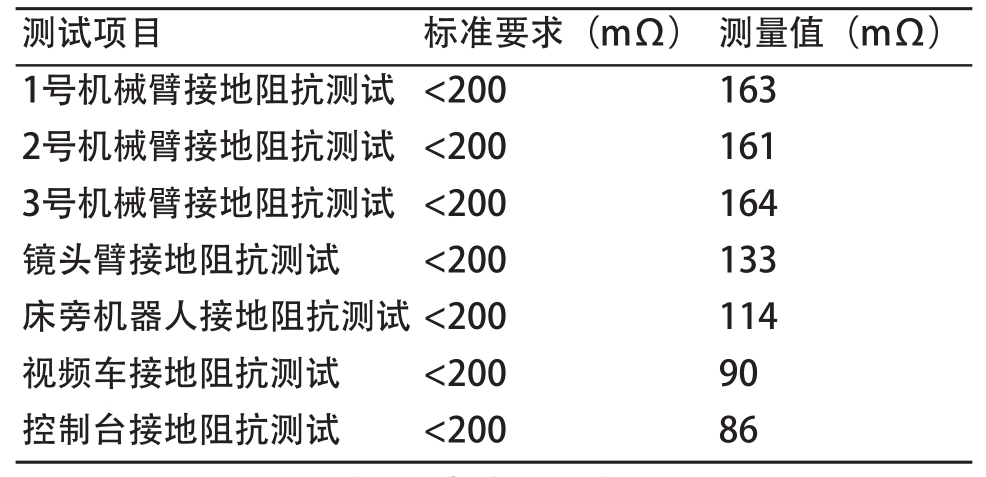
表2 漏电流测试结果
2.2 钢丝松紧度测试
目的:测试传动钢丝的松紧度,判断传动钢丝是否能精确的将电机动作传递到器械臂器械上。
测试仪器:测力表。
测试对象:床旁机器人的4条机械臂。
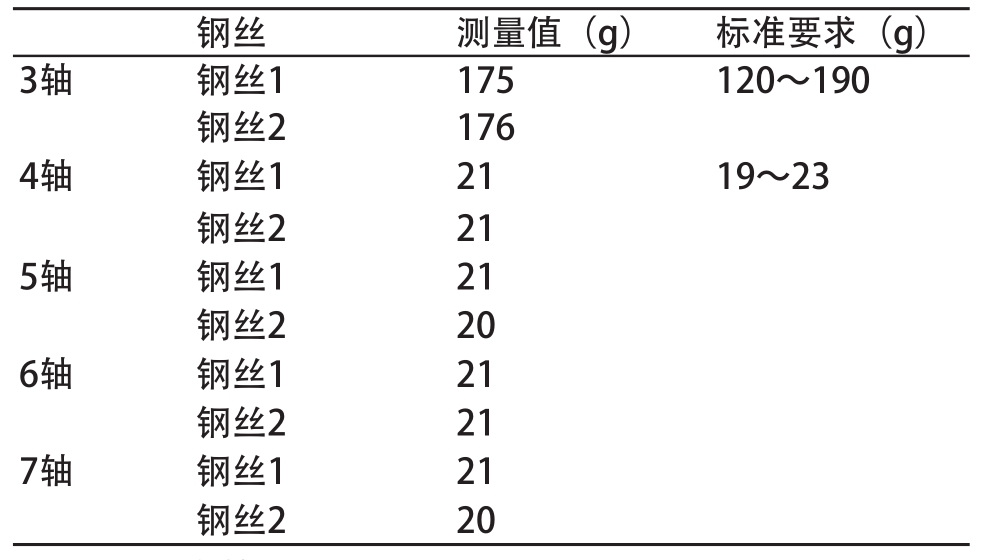
步骤:进入维修模式,选择其中一条机械臂,进入钢丝拉力测试状态;用250 g量程测力表,分别拨动第3轴的两根钢丝的指定位置,使位移到达指定位移,读出测力表的读数并记录。用50 g量程测力表分别拨动第4轴、第5轴、第6轴和第7轴的8根钢丝的指定位置,读出测力表的读数并记录;用同样的方法测量另外两条器械臂的各根钢丝。选择其中一条机械臂的测量结果,见表3。钢丝松紧度正常,符合厂家标准传动需求。
表3 钢丝拉力测试结果
2.3 配重平衡检测
目的:测试各机械臂在通电状态和断电状态下的配重平衡,以及电磁锁的锁止力度。
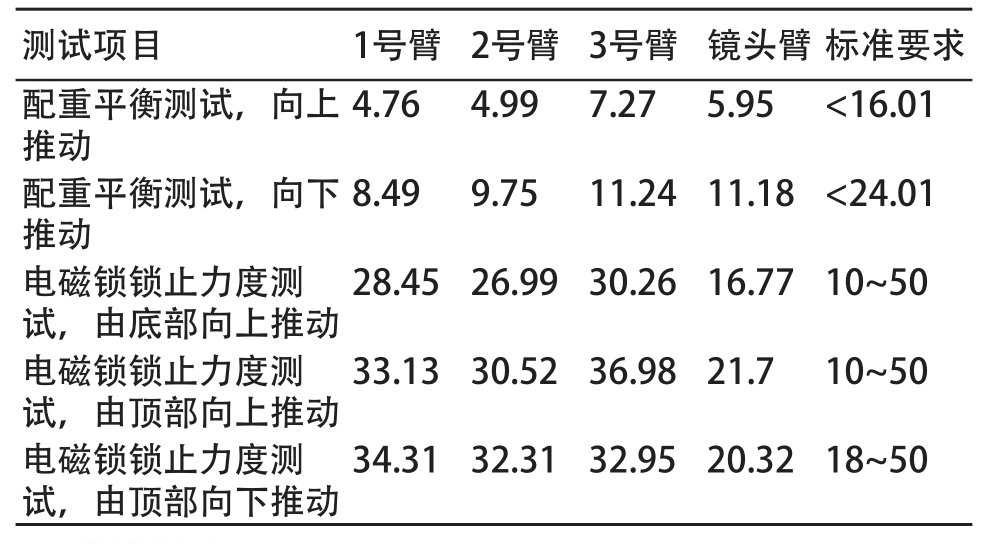
步骤:测试配重平衡,将每条机械臂展开到指定位置,远端安装标准配重砝码(1.1磅),在维修模式下控制每条臂的电磁锁使电磁锁释放,远端位移不得超过2.5 cm;在电磁锁释放状态下用推拉力表推动机械臂的指定着力点,使机械臂缓慢匀速向上和向下运动,记录推拉力表的读数;在电磁锁锁止状态下用推拉力表推动机械臂的指定着力点,使机械臂向上和向下移动,记录推拉力表的读数。测量结果,见表4。
注意:使用推拉力表推动机械臂运动过程中必须平滑运动,不能有阻力不均匀的情况。配重平衡符合厂家标准要求(推拉力表型号:DFE-50)。
表4 配重平衡测试结果(磅)
2.4 摩擦测试
表5 摩擦测试结果
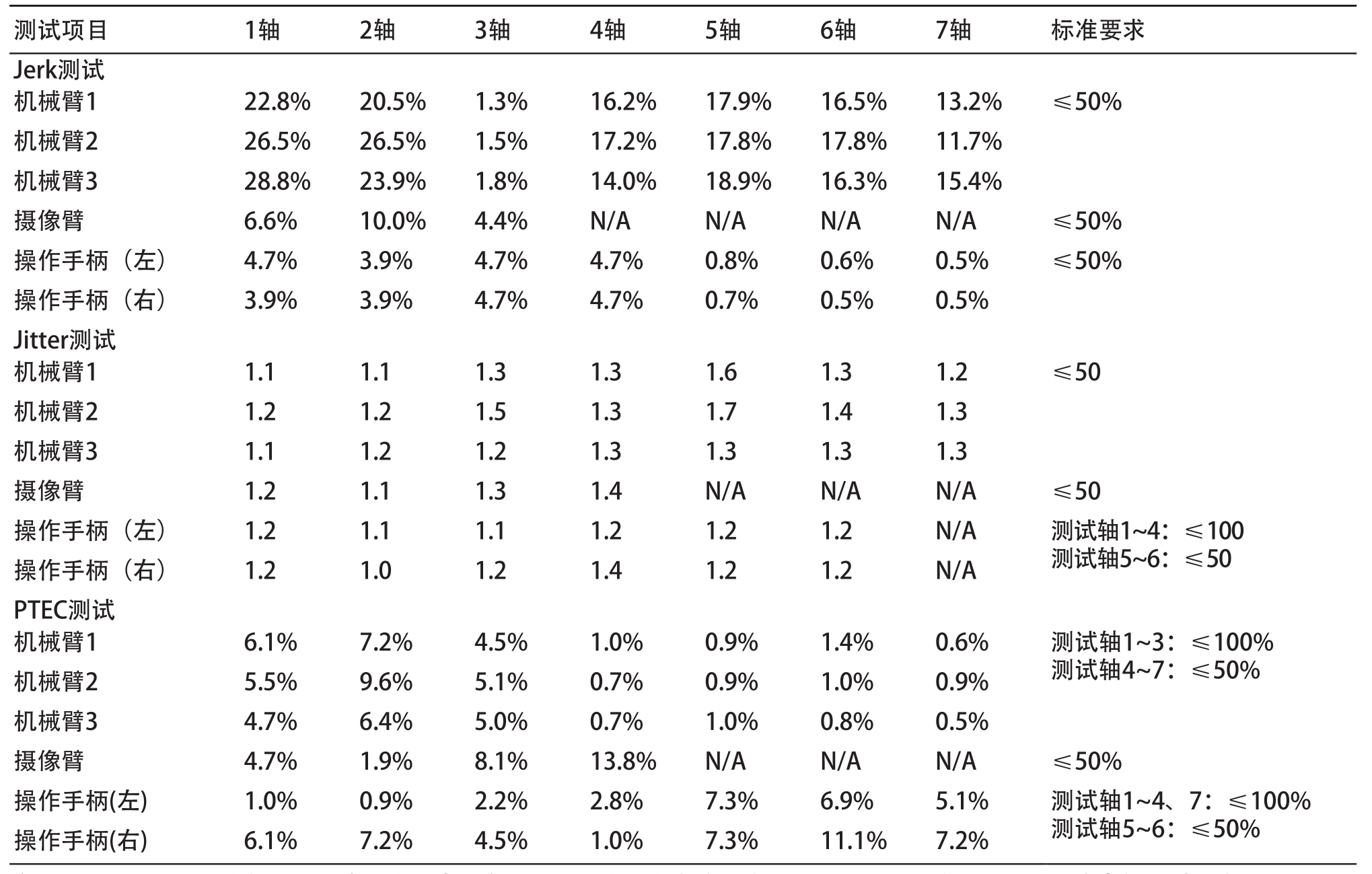
注:Jerk测试代表抖动卡顿,反映运动的速度突变,测量结果为失败极值的百分数,用于检测机器滑动或者转动过程中不平滑的程度;Jitter测试代表运动不顺滑,反映运动的力量突变,测量结果为每一个测试轴的原始突变数值,主要是电机传动机械臂各轴的时候,有时因为机械的不平整造成用力不均的情况下导致运动速度不线性变化;PTEC测试代表传感电位器和编码器的对比,位置传感器和力传感器互相验证,测量结果为失败极值的百分数。
目的:医生的手部动作转换为机械手在患者体内的相应动作这一过程非常复杂,机械部件的摩擦力不但影响动作转换的精度,也影响动作的力度。机器使用过程中会发生磨损和老化,都会对运动部件的摩擦力产生影响,所以摩擦力的质量控制尤其重要。
测试对象:床旁机器人的4条机械臂及控制台的医生操作手柄。
步骤:维修模式下,通过维修程序让手术机器人的机械手和控制台的医生操作手柄做全范围动作,借助位于机器内的位置传感器和力传感器,通过采样,可以检测各个运动部件在运动过程中产生的摩擦力,通过计算得出摩擦或者磨损造成的力的变化。测量结果见表5。
测试要求:测试过程中要求地面平整,机器的立柱以及关节臂电磁锁锁止力度足够。机械臂各关节在运动过程中不能够发生碰撞,机械臂的滑轨上不能有凸起或者凹陷,机械臂关节的轴承和斜齿轮不能够严重磨损。机器检测结果必须在误差允许范围内。测试过程中机械臂运动顺畅,结果显示各方向运动阻力在厂家标准误差范围内,摩擦测试通过。
2.5 手柄检测
目的:保证手柄能将医生的手部动作及时精确的采样,手柄能够大范围运动,手柄各关节转动顺畅,手柄重力补偿适度,医生在长时间手术过程中不会因为手柄的自身重量产生疲劳。
测试对象:控制台的医生操作手柄。
步骤:开机自检完成后,左右手柄能够归水平位。手术状态下操作手柄向各个方向运动,用力没有明显差别;维修模式下,操作手柄使各个关节运动,机器能够及时将位置信息采样通过维修程序让控制台的医生操作手柄做全范围动作,借助位于机器内的位置传感器和力传感器,通过采样,可以检测各个运动部件在运动过程中的极限位置、摩擦力和重力。测试结果显示:摩擦检测结果在误差允许范围内,手柄机械臂重力补偿合适,各关节运动顺畅,各方向运动阻力在误差范围内,符合厂家标准。
测试要求:地面平整,控制台刹车踏板处于刹车状态,医生显示系统组件和医生手臂托架都升高到最高位置;手柄各关节在运动过程中不能够发生碰撞。厂家标准要求:手指套环运动到的极限位置时,采样值正好是+1和-1。
2.6 光纤检测
目的:保证控制台,视频车和床旁机器人三个主要部件之间的数据和信号能够正常传输。
测试对象:传输光纤线缆。
步骤:待机状态下查看光纤状态指示灯;关机取下光纤,用光纤检测显微镜仔细检查光纤的两端端面;开机进入维修模式在维修界面下测试光纤通讯。
要求:光纤指示灯指示蓝色,不能是黄色或者红色;显微镜观察光纤的端面必须平整洁净;在机器维修模式下检测光纤通讯。
2.7 视频系统检测
目的:确保视频系统能将患者体内的影像及时清晰的传输到医生显示器和助手显示器,能够按需要调节聚焦,助手触摸屏上的标记能够在显示在医生显示器上;能够满足手术视频刻录和转播需要。
测试对象:成像系统。
步骤:利用触摸屏自检功能进行显示特性校准,选择内镜型号和角度,做白平衡校准。白平衡校准成功之后安装3D校准模块进行3D校准并安装测试器械进行测试。
要求:触摸屏和医生3D显示组件各功能能够正常工作,白平衡和3D校准能够完成(图1)。手术模式下在控制台医生可以远程控制成像系统的聚焦和放大,可以看见助手显示器触摸屏上画的标记,显示画面不晃动,不闪烁,立体感真实。检测结果符合厂家标准要求。

图1 视频系统测试结果
3 结语
尽管该类设备发生机械性故障和功能障碍的几率相对较低[7-8],但鉴于设备的风险分类、高昂的购置维保价格和大多数医院无备机的现状,我们需严格按照操作规程操作仪器并定期进行设备的质量控制与保养,最大限度地降低故障发生率,保证机器的使用率[9-10],使机器人辅助微创外科手术得以顺利开展。希望我院对达芬奇Si手术机器人系统质量控制的心得能提升大家对微创手术机器人的质量控制与保障的认识,使微创手术机器人这一利器能发挥其巨大的临床效用和社会效益。
[参考文献]
[1] 杜志江.达芬奇手术机器人系统技术分析[J].机器人技术与应用,2011,(4):14-16.
[2] F.Pugin,P.Bucher,P.Morel.History of robotic surgery: da Vinci?[J].Journal of Visceral Surgery,2011,148(5):e3-e8.
[3] 杜祥民,张永寿.达芬奇手术机器人系统介绍及应用进展[J].中国医学装备,2011,8(5):60-63.
[4] 微创外科手术机器人—Da Vinci S手术系统[J].微创医学, 2010,(5):433-434.
[5] R.Kumar,N.Shrivastava,A.Seth,et al.Device malfunction with the da Vinci S? surgical system and its impact on surgical procedures[J].European Urology Supplements,2015,14(2):e873.
[6] Borden LS Jr,Kozlowski PM,Porter CR,et al.Mechanical failure rate of da Vinci robotic system[J].The Canadian Journal of Urology,2007,14(2):3499-3501.
[7] 陈广飞,周丹,张茜.达芬奇手术机器人系统在医疗中的应用[J].机器人技术与应用,2011,(4):11-13.
[8] Won Tae Kim,Won Sik Ham,Wooju Jeong,et al.Failure and Malfunction of da Vinci Surgical Systems During Various Robotic Surgeries:Experience From Six Departments at a Single Institute[J].Urology,2009,74(6):1234-1237.
[9] Nicolas C.Buchs,Fran?ois Pugin,Francesco Volonté,et al.Reliability of robotic system during general surgical procedures in a university hospital[J].The American Journal of Surgery,2014,207(1):84-88.
[10] 李澍,李佳戈,苏宗文.医疗器械电磁兼标准解析[J].中国医疗设备,2014,29(2):14-17.
Quality Control of the Da Vinci Si Robotic Surgical System
YU Dong-lan1, LIU Yang-ping1, LI Hong-xing1, FENG Jin-tao1, CUI Yong-lin1, KUANG Ming1,2
1. Department of Medical Equipment, the First Affiliated Hospital of Sun Yat-Sen University, Guangzhou Guangdong 510080, China; 2. Department of Hepatic Surgery, the First Affiliated Hospital of Sun Yat-Sen University, Guangdong Guangzhou 510080, China
Abstract:Objective The Da Vinci Si surgical system is the most advanced platform for minimally invasive surgery available in the world nowadays. The integration of the high-resolution 3D vision, the wristed instrumentation, and the intuitive motion control enables the Da Vinci surgery do not to be limited by conventional surgical technologies. The system also provides a minimally invasive approach to a broad range of complex surgical procedures. High precision and quality is essential for the success of the surgery and the outcome of operation. Thus quality control and maintenance is very important in the system. Methods Emphasis was placed on the quality control of the Da Vinci Si robotic surgical system based on the Medical Device Directive, 93/42/EEC and manufacturer’s standard. The components of quality control includes the electrical safety, the stability and accuracy,and the visual and information communication. Results The precision and function of the Da Vinci Si robotic surgical system, as well as patients’ safety, were ensured through quality control. Conclusion It is important to check the system strictly based on the quality control standard and to maintain the system regularly to fi nd out potential defective parts. It is essential to avoid non-intuitive control, blurred images, and instability of communication signals of the robotic system to ensure the safety and success of the surgery.
Key words:robotic surgical system; quality control; electrical safety test; monitor
[中图分类号]TP242
[文献标志码]B
doi:10.3969/j.issn.1674-1633.2016.01.040
[文章编号]1674-1633(2016)01-0128-04
收稿日期:2015-04-17
修回日期:2015-10-25
通讯作者:匡铭,教授,博士。